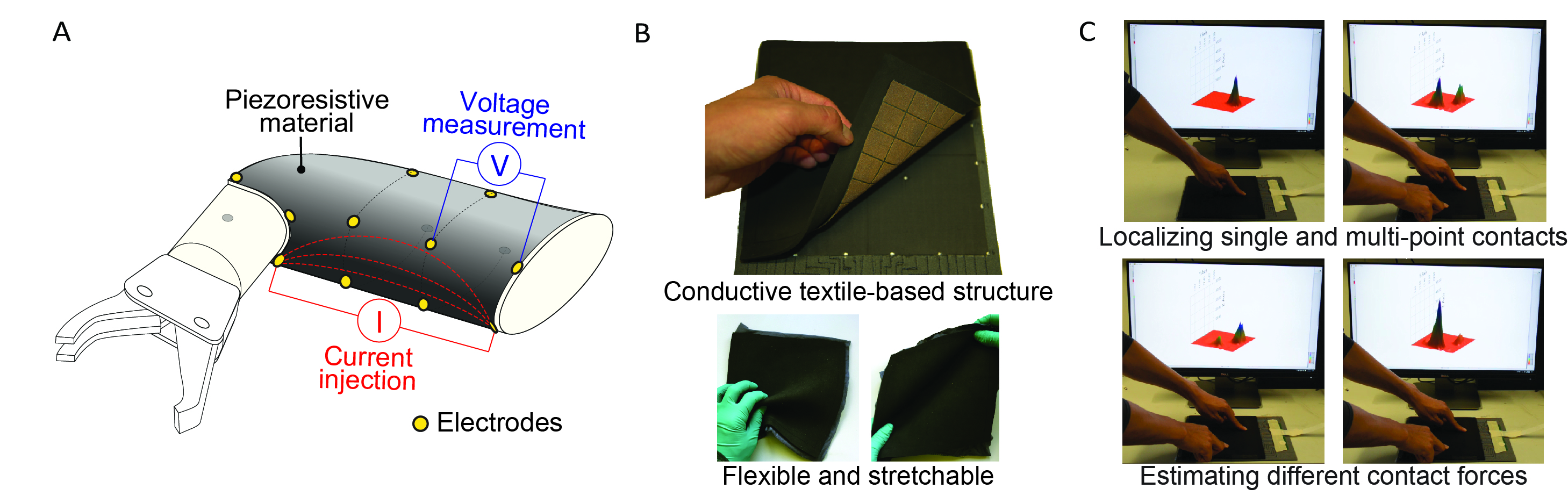
We have pioneered large tactile sensors based on electrical resistance tomography (ERT). (A) The key concept of our sensing approach. (B) A sensor prototype made of conductive textiles. (C) Demonstrations of our system’s ability to sense multiple contact locations and force magnitude.
Being able to perceive physical contact is essential for intelligent robots to work well in cluttered everyday environments. Since physical contacts can occur at any location, a successful tactile sensing system should be able to cover all of a robot’s exposed surfaces. Most researchers have pursued the creation of large tactile skin by using many sensing elements that are each responsible for a region; however, deploying many sensing elements is not efficient considering manufacturability, cost-effectiveness, and durability.
This project aims to build a robot skin that combines a sensor design and a computational approach to achieve efficient large-area tactile sensing. The key principle is using a piezoresistive material with a small number of distributed point electrodes; current is injected between successive pairs of electrodes, and the resulting voltage distribution is measured at other electrodes. We used this approach with conductive textiles to create several flexible and stretchable tactile sensor prototype [ ]. They successfully estimate contact location, contact shape, and normal force magnitude over a broad region.
This project opened up two subprojects to enhance large-area tactile sensing performance. The first subproject was optimizing the current injection and voltage measurement by considering the temporal locality of contacts across a large area [ ]. This subproject achieved a tactile sensing framerate over 400 Hz, which is five times faster than the conventional method. The second subproject was enhancing the contact estimation performance using sim-to-real transfer learning [ ]. This subproject demonstrated that a multiphysics model of the sensor could substantially improve the contact information estimation performance when combined with deep neural networks. In the future, we plan to apply this tactile sensing approach on a real robot surface to demonstrate a whole-body robot skin.