A Large-Scale Fabric-Based Tactile Sensor Using Electrical Resistance Tomography
2018
Miscellaneous
hi
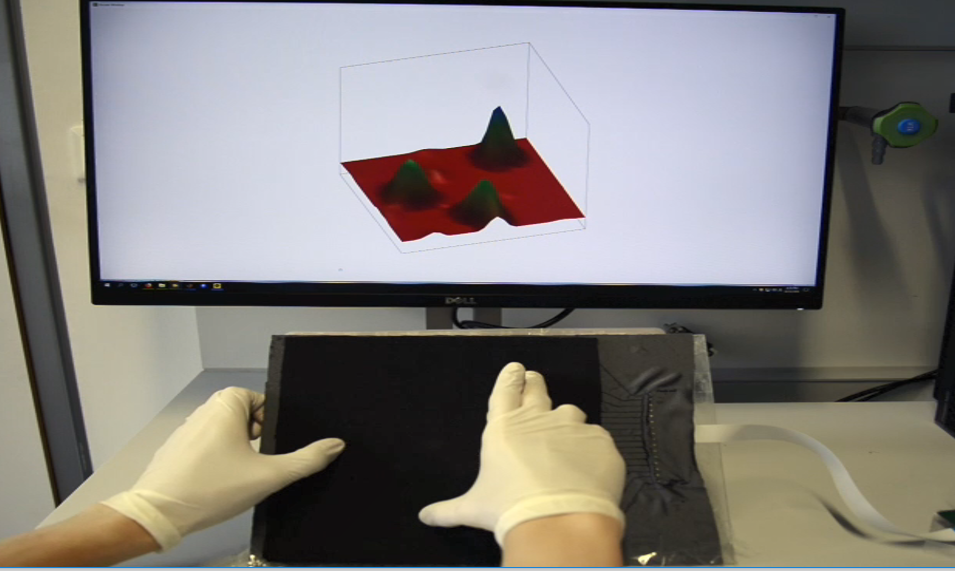
Large-scale tactile sensing is important for household robots and human-robot interaction because contacts can occur all over a robot’s body surface. This paper presents a new fabric-based tactile sensor that is straightforward to manufacture and can cover a large area. The tactile sensor is made of conductive and non-conductive fabric layers, and the electrodes are stitched with conductive thread, so the resulting device is flexible and stretchable. The sensor utilizes internal array electrodes and a reconstruction method called electrical resistance tomography (ERT) to achieve a high spatial resolution with a small number of electrodes. The developed sensor shows that only 16 electrodes can accurately estimate single and multiple contacts over a square that measures 20 cm by 20 cm.
| Author(s): | Hyosang Lee and Kyungseo Park and Jung Kim and Katherine J. Kuchenbecker |
| Pages: | 107--109 |
| Year: | 2018 |
| Month: | November |
| Department(s): | Haptic Intelligence |
| Research Project(s): | |
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Demonstration |
| Address: | Incheon, South Korea |
| DOI: | 10.1007/978-981-13-3194-7_24 |
| How Published: | Hands-on demonstration (3 pages) presented at AsiaHaptics |
| State: | Published |
|
BibTex @misc{Lee18-AHD-Tactile,
title = {A Large-Scale Fabric-Based Tactile Sensor Using Electrical Resistance Tomography},
author = {Lee, Hyosang and Park, Kyungseo and Kim, Jung and Kuchenbecker, Katherine J.},
pages = {107--109},
howpublished = {Hands-on demonstration (3 pages) presented at AsiaHaptics},
address = {Incheon, South Korea},
month = nov,
year = {2018},
doi = {10.1007/978-981-13-3194-7_24},
month_numeric = {11}
}
|
|