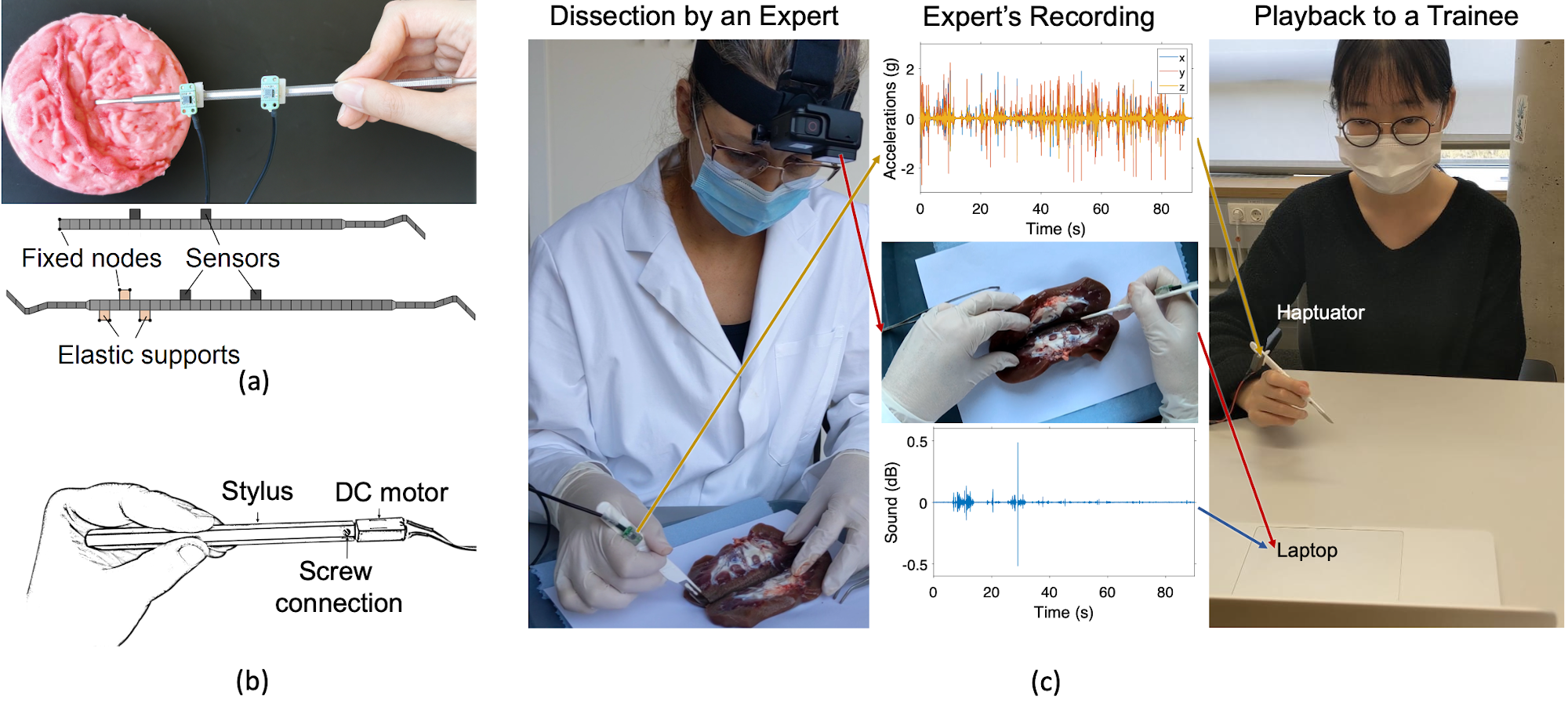
We are investigating several aspects of a medical training technique that records and replays instrument vibrations along with video and audio. (a) A finite element model used to optimize the location of the vibration sensor. (b) Our new approach to vibrotactile actuation using a DC motor. (c) An expert dissecting a pig kidney (left); the vibrations recorded from the scalpel (top middle); one first-person image (center middle), and the corresponding audio signal (bottom middle); a trainee experiencing the recorded interaction via a laptop and an actuated tool (right).
Clinicians perform many tasks that require complex sensorimotor skills, which are challenging and take time to master. Experts strongly recommend using simulators for training, as the patient's safety is of top priority. However, creating effective simulators requires a deep understanding of both engineering and medicine. Considering these challenges, we developed a method to capture clinically relevant vibrotactile cues without disrupting the procedure and replay these cues along with video and audio for training [ ].
We attach a small accelerometer to the tool to robustly measure the rich physical contact vibrations felt by the expert without disturbing their movements. We seek to optimize the location of the accelerometer to maximize its vibration-sensing capability in the frequency range relevant to touch. For this goal, we characterize the dynamic properties of the selected medical tool by utilizing finite element analysis along with physical experiments [ ]. We plan to validate the effectiveness of the optimized accelerometer placement through comparisons with other configurations during actual tool use. Finally, we process the contact vibrations measured with an optimally placed accelerometer and record them with the corresponding sound and video.
For training, we replay the audio, video, and vibration signals using a vibrotactile actuator along with a display. Listening to and watching the tool interacting with the tissue while also feeling what the expert felt provides a realistic experience with many advantages compared to physical and virtual simulators. Commonly used vibrotactile actuators are either expensive or have limited vibration output amplitudes. To tackle these problems, we designed a cost-effective DC-motor-based vibrotactile actuation system that can generate high-fidelity haptic feedback on a stylus. We plan to use this compact and effective actuation approach for replaying the recorded vibrotactile cues.