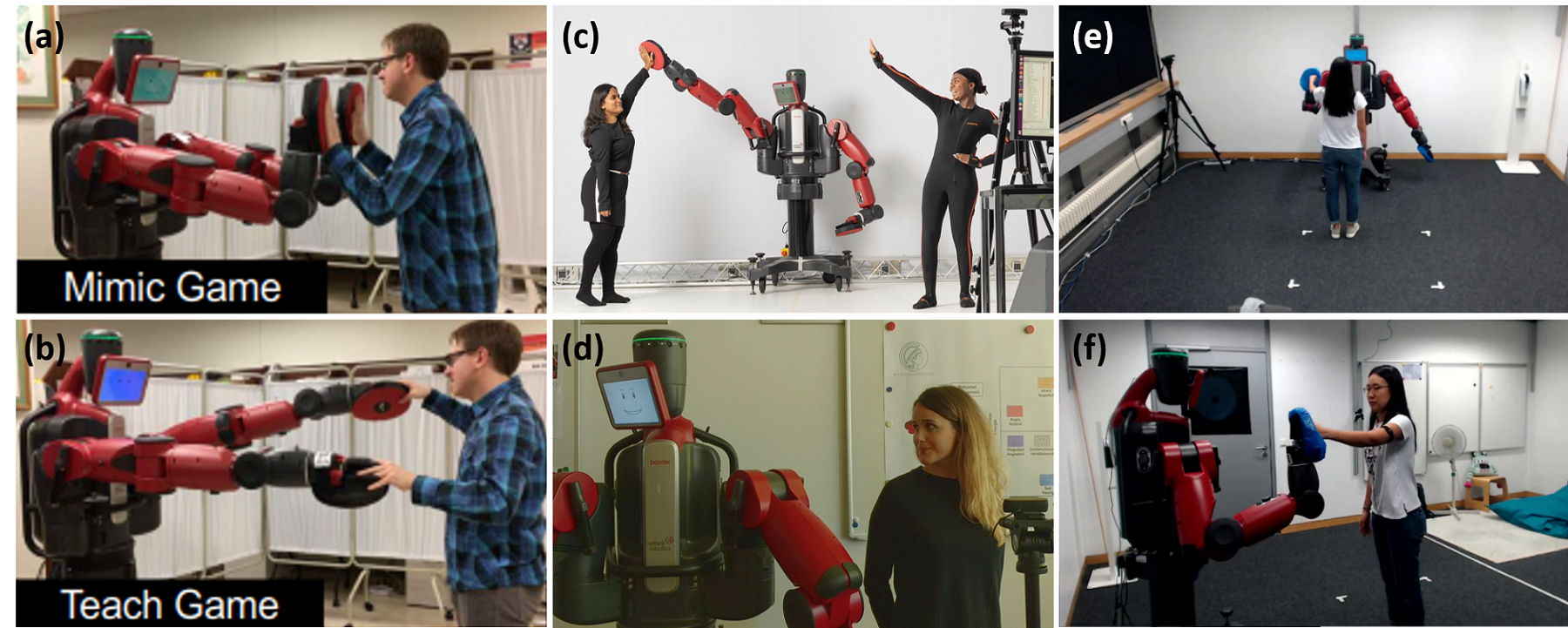
We are creating and evaluating ways in which robots can get people to do physical activity. (a, b) An end-user playing two of our eight exercise games with Baxter. (c) An operator teleoperating Baxter's arms to give a high-five to an end-user. (d) Baxter imitating an operator's head movement and facial expression. (e, f) An end-user interacting with Baxter within the Robot Interaction Studio.
Physical activity plays a critical role in maintaining one's health. Past research has shown that well-designed robots can motivate users to perform regular exercise and physical therapy.
To understand how people respond to exercise-based interactions with a robot, we developed eight exercise games for the Rethink Robotics Baxter Research Robot. These games were developed with the input and guidance of experts in game design, therapy, and rehabilitation, and via extensive pilot testing [ ]. Results from our game evaluation study with 20 younger and 20 older adults support the potential use of bimanual humanoid robots for social-physical exercise interactions [ ]. However, these robots must have customizable behaviors and end-user monitoring capabilities to be viable in real-world scenarios.
Novel robot behaviors can be created using teleoperation. We are creating an interface that allows a therapist operator to control Baxter in a physically and emotionally expressive manner [ ]. Baxter's arm and head movements are based on measurements from Xsens, an inertial motion-capture suit worn by the operator. Ongoing work centers on optimization-based kinematic retargeting in real time. The robot's head and face can simultaneously be teleoperated via emotion recognition on a video of the operator.
The end-users of our robotic exercise coach will be monitored via the Robot Interaction Studio, a platform for enabling minimally supervised human-robot interaction. This system combines Captury Live, a real-time markerless motion-capture system, with a ROS-compatible robot to estimate user actions in real time and provide corrective feedback [ ]. We evaluated this platform via a user study where Baxter sequentially presented the user with three gesture-based cues in randomized order [ ]. Without instructions, we found that the users tended to explore the interaction workspace, mimic Baxter, and interact with Baxter's hands.
Our next step is to enable experts in exercise therapy to prototype a wide range of social-physical interactions for Baxter using our teleoperation interface [ ]. These teleoperated behaviors can be recorded and then autonomously learned and repeated. We envision scenarios in a community rehabilitation center where a robot in the Robot Interaction Studio acts as an exercise partner or coach for an end-user.