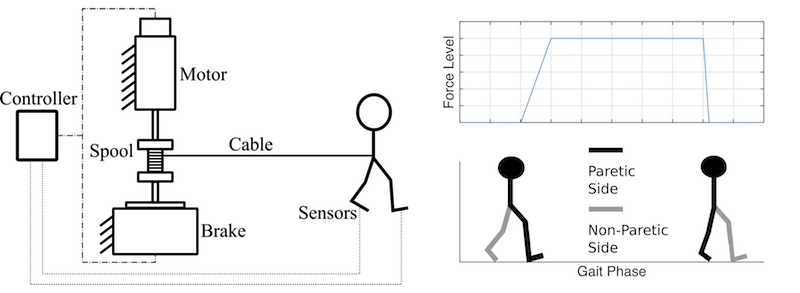
The left image shows a schematic of the proposed device: a person is tethered to a spool, which is connected to a motor and a brake, and data from the sensors underneath the shoes is transmitted wirelessly to the controller. The right image shows the asymmetric resistive force with the corresponding gait phases.
Walking speed and symmetry are high priorities for people with hemiparesis from stroke. We developed the Gait Propulsion Trainer (GPT) to help such individuals improve their walking abilities by increasing the propulsive force generated by the paretic leg. The GPT centers on a cable spool attached to a stand at waist level. The end of the cable attaches to the center back of a waist harness worn by the user. As the person walks away from the spool, a rotary brake on the spool's shaft resists its rotation between paretic mid-stance (non-paretic toe off) and paretic swing onset (paretic toe off). This periodic resistance was designed to make the participant push off harder than usual on the paretic side when advancing forward. A motor helps cancel the brake's friction when the resistance is not active and also reels in the cable between trials [ ].
After building and characterizing the device, we conducted a preliminary study at SUNY Stony Brook University, USA, with a 24-year-old female with left-side hemiparesis and gait asymmetry following pediatric traumatic brain injury [ ]. We found that GPT resistance increased paretic leg propulsive forces generated in late stance by 25% over baseline values. Importantly, increased paretic propulsion persisted when GPT resistance was removed in post-braking trials, even though the participant walked with the GPT for a short training period (only ten 10 m trials).
This project was funded by the US National Institutes of Health (NIH) via grant #R03HD092822; Erin Vasudevan and Katherine J. Kuchenbecker were this grant's co-principal investigators.