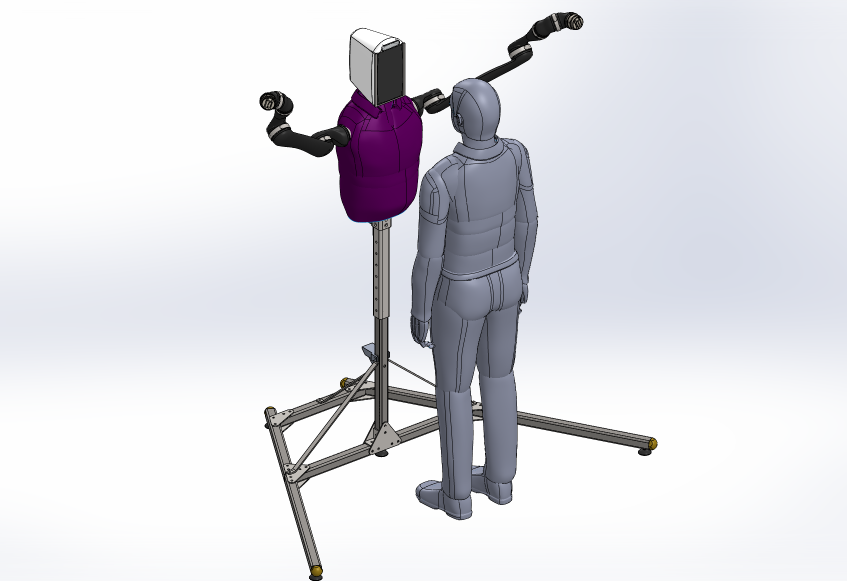
A CAD model of HuggieBot 2.0. This robot features two Kinova JACO 6-DOF arms, a customized v-shaped base for close interactions, an adjustable stand to adapt to user height, an inflatable pressurized chest to measure hug tightness, and a screen for showing either an animated face or a pre-recorded video message.
Our first HuggieBot research project showed that people are generally accepting of soft, warm robot hugs that squeeze the user and release promptly. In the future we would like to see if robot hugs can provide the same known health benefits as human hugs. Testing this hypothesis requires a new version of HuggieBot that allows more control over hugs than our original robot test platform; thus, we are therefore now designing, building, and programming HuggieBot 2.0.
The HuggieBot 2.0 custom robot design builds off positive and negative critiques of the Willow Garage Personal Robot 2 (PR2), which was used in our previous experiment [ ]. As shown in the figure above, a v-shaped stand will allow participants to get closer to the robot without having to lean over a large base, which was a pain point with the PR2.
This new platform uses two Kinova JACO 6-DOF arms, which are slimmer, quieter, and smoother than the arms of the PR2. To accommodate various hugging arm placements and to streamline the hugging process, we are currently creating an inflatable chest that includes haptic sensors; the chest will additionally be soft and heated because users responded favorably to these two features during the previous study. A final element of HuggieBot 2.0 is a face screen that can show both animated faces or pre-recorded video messages to make the hug experience more personal, more enjoyable, and less mechanical for the user.
To test if HuggieBot 2.0 can provide similar health benefits to people as human hugs, we plan to carefully induce mental stress on study participants and then offer either a human hug, an active robot hug, a passive robot hug, or self-soothing. We will use objective measures such as heart rate, facial expression, and cortisol and oxytocin levels to evaluate users' physical responses to the different hugs.