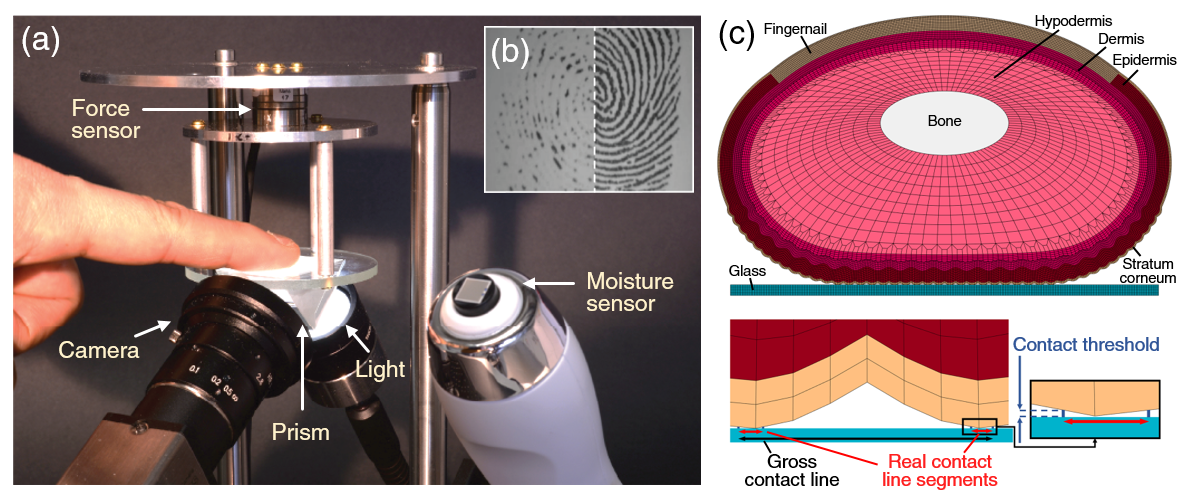
(a) One apparatus to measure three-dimensional contact forces, fingerprints over time, and finger moisture. (b) Two captured images showing the real contact area with a dry (left) or moist (right) finger. (c) One of our fingertip finite element models in frictional contact with a surface and the associated contact area calculation.
The finger's instantaneous contact state with a surface is strongly affected by its peripheral environment. Fluid on the contact surface and the secretion of sweat from the fingerpad's glands cause particularly profound effects because the outer layer of skin easily absorbs moisture. To elucidate fundamental aspects of tactile interaction, we study how moisture affects the finger's material properties, the contact area, the creation of friction, and perception.
First, we have built a series of apparatuses to measure three-dimensional finger contact forces, contact images, and fingerpad moisture [ ]. The camera captures clear fingerprint images by means of a reflection-based optical design that contrasts between contact and non-contact areas. We are presently developing a transparent real-time moisture sensor to include in future setups.
We used one setup to investigate the influence of different wetting conditions on the initial contact evolution. The area measurements showed that the chosen fluid can drastically alter the real contact area (where the fingerprints touch the glass); however, gross contact area (the entire oval-shaped area over which contact occurs) was only slightly affected. To explore the causes of this phenomenon, we investigated the combined effects of tissue elasticity, skin-surface friction, and fingerprint ridges on contact area using a detailed finite element model. The simulations revealed the dominant influence of the elastic modulus over friction and an unusual contact phenomenon.
We used another apparatus and a three-dimensional finite element model to study how sweating affects the development of gross contact area [ ]. Four key material properties of our model were optimized to fit the measurements obtained from a participant repeatedly pressing on a glass plate in dry, natural, and moist finger conditions. The results showed that the softness of the bulk tissue reduces as the finger becomes more hydrated, and the epidermis of the moist finger is softest.
Finally, we investigated how contact mechanics relate to perception by studying why people sometimes perceive a sensation of stickiness when pulling their finger away from a surface [ ]. We asked nine participants to actively press their finger on the glass plate of our apparatus. Our analyses showed that finger-surface adhesion builds with pressing time, causing a larger normal impulse during detachment and thus a more intense stickiness sensation.