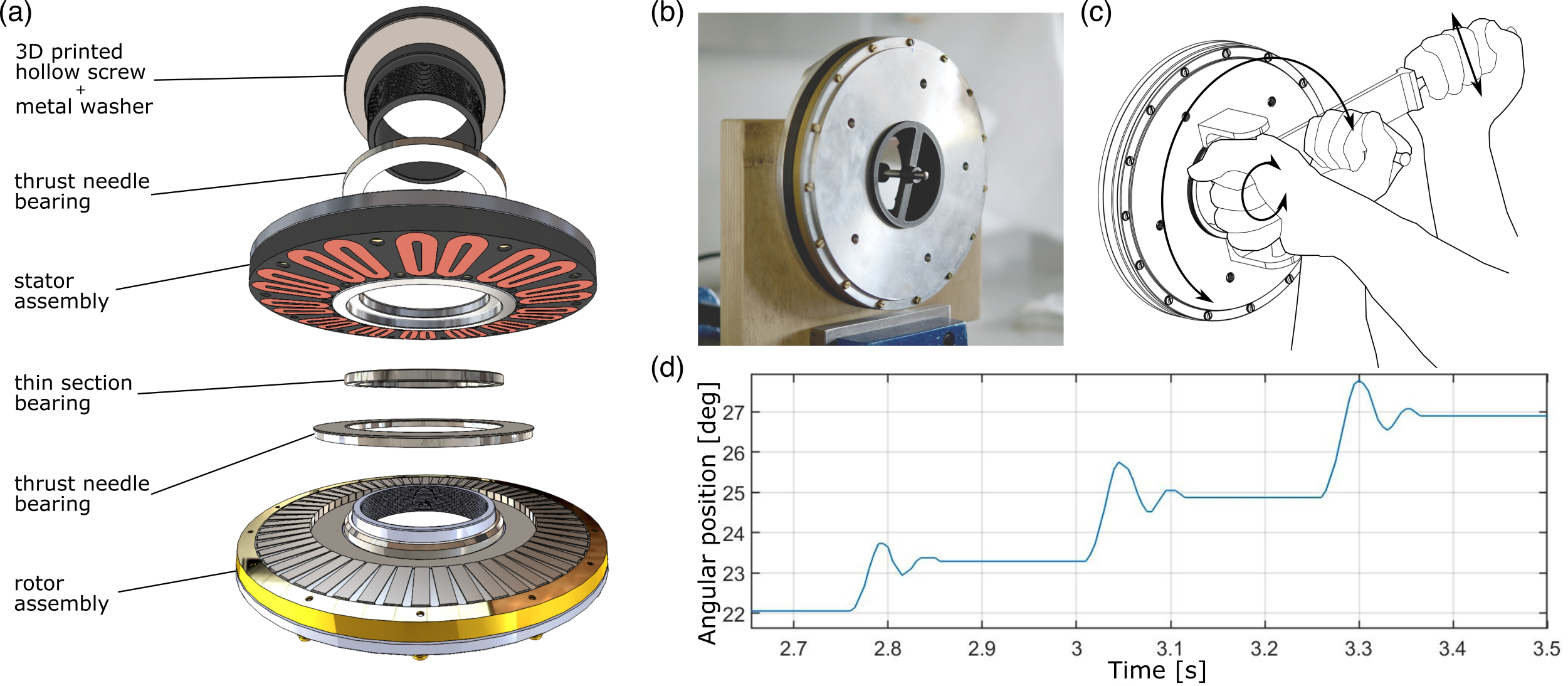
We have invented a new high-performance motor for haptic applications. (a) Exploded view of the motor design. (b) Photograph of the fabricated motor. (c) Illustration of how such a motor could be used for three possible force-feedback devices. (d) Three step responses (1.2$^{\circ}$, 1.6$^{\circ}$, and 2$^{\circ}$) of the motor in closed-loop position control.
Quality force-feedback devices should supply haptic cues that are both strong and crisp. Delivering such sensations requires the use of high-torque-density motors that rotate smoothly and are capable of operating at near-zero speeds at any angular position. Currently available electric motors fall short of these requirements in direct-drive operation and must thus always be used with a mechanical transmission, which is complex, bulky, and encumbering.
In this project, we design and evaluate a new motor structure: a brushless ironless motor using a Halbach-magnet ring and a planar Lorentz-coil array [ ]. The strengthened magnetic field on one side of the magnet ring varies sinusoidally along the circumference of the ring. Our design takes advantage of this attribute by using the two-phase Lorentz coils to interact with the field and thus generate a constant torque at any angular position. This two-phase design allows for a planar coil arrangement instead of overlapped coils as with existing three-phase designs. The two-phase planar coils can be separately made to enhance the fill factor (i.e., effective volume of copper divided by total coil volume) and geometrical accuracy. The motor's torque constant has been both analytically calculated and experimentally verified through torque measurements.
This motor outperforms existing Halbach ring and cylinder motors with a torque constant of 0.78 Nm/A, a record in the field. With a constant amplitude of the two-phase currents, the standard deviation of the measured torque around a full spatial period of the magnet array is within 3% of the nominal torque. We validated our motor design by commanding step responses with and without a torque disturbance at random angular positions. We used a proportional-integral-derivative controller with a refreshing frequency of 200 Hz.
Ongoing work focuses on more detailed characterization of our new motor’s performance compared to the state of the art. Future research will explore the use of this motor in common haptic applications such as upper-limb rehabilitation or the steering wheel of a driving simulator.