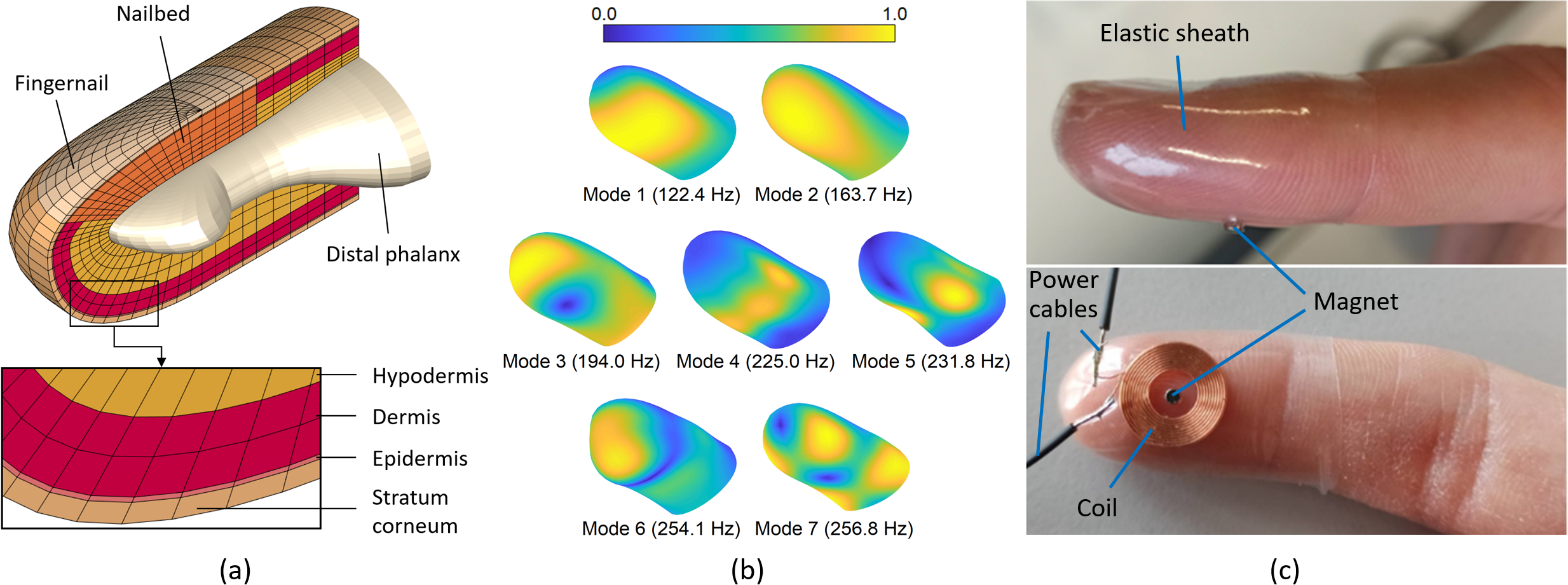
Dynamic analysis of the human fingertip and a wearable vibrotactile device partially inspired by these analyses. (a) DigiTip, our high-fidelity finite element model of the fingertip. (b) The first seven free vibration modes predicted by DigiTip. (c) A wearable haptic device created from a thin silicone finger sheath with an embedded magnet for delivering vibrotactile feedback.
Humans regularly use their fingertips to physically explore and manipulate their surroundings. For example, healthy adults can distinguish a near infinite range of textures and can quickly compensate when a grasped object slips unexpectedly. The fingertips exhibit this very high tactile sensitivity because they are densely enervated with receptors that detect mechanical stimuli ranging from steady-state deformations up to 1000 Hz vibrations.
Hence, significant scientific effort has been devoted to understanding fingertip deformation mechanics and designing glove-like haptic interfaces, but these efforts have rarely been coordinated or even informed by each other. This project investigates the dynamic characteristics of the human fingertip and simultaneously uses that knowledge to develop a wearable device that can provide high-fidelity vibration feedback.
To deeply understand the dynamics of the human fingertip, we used prior anatomy and biomechanics studies to create a detailed three-dimensional finite element model named DigiTip [ ]. This model was used to compute the free and forced vibration responses, which illuminate the deformation of the human fingertip in haptic interactions involving oscillating stimuli. Given the amount of prior research conducted on human fingertips, it is surprising that these free vibration modes have never before been reported in the literature.
We have recently used this understanding to invent a new type of wearable vibrotactile device: an elastic sheath comfortably holds an embedded permanent magnet on the skin while AC current through a nearby coil generates strong, clear vibrations. Experiments with human participants confirmed that this design achieves exceptional transmission of expressive vibratory signals, as it adeptly stimulates the fourth vibration mode of the human fingertip. We adapted our DigiTip model to match one particular finger and added the soft elastic film and magnet. The excellent agreement between the resulting simulated and experimentally measured vibrations shows the usability of computational models in predicting soft tissue dynamics and characterizing vibratory haptic devices.