Haptic interfaces are mechatronic systems that modulate the physical interaction between a human and his or her tangible surroundings so that the human can act on and feel a virtual and/or remote environment. How can such systems vividly reproduce the perceptual experience of touching real objects and provide feedback that helps the user improve his or her motor skills? We seek to answer these questions by carefully studying existing technologies and inventing new haptic interfaces.
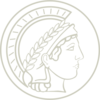
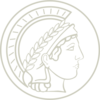
Since the start of the field of haptics in the early 1990's, three distinct archetypal haptic interface categories have emerged: grounded kinesthetic haptic interfaces, ungrounded haptic interfaces, and surface haptic interfaces. Although they differ in key ways, they all function in the same overall manner: the haptic interface's mechanical, electrical, and computational elements work together to monitor and modify the user's physical interaction with his or her tangible surroundings.
We do research on all three categories of haptic interfaces. In the relatively well-established area of grounded force-feedback devices, we mainly seek to understand, share, and benchmark the diversity of past designs to accelerate haptic device innovation and enable standardized performance comparisons. We are also inventing new high-performance haptic actuation systems for grounded devices. In the newer areas of ungrounded and surface haptic interfaces, we aim to expand what is possible by inventing, refining, and carefully evaluating new devices. Such work often includes hardware design, actuator and sensor selection, calibration, control optimization, application design, system integration, and human studies.