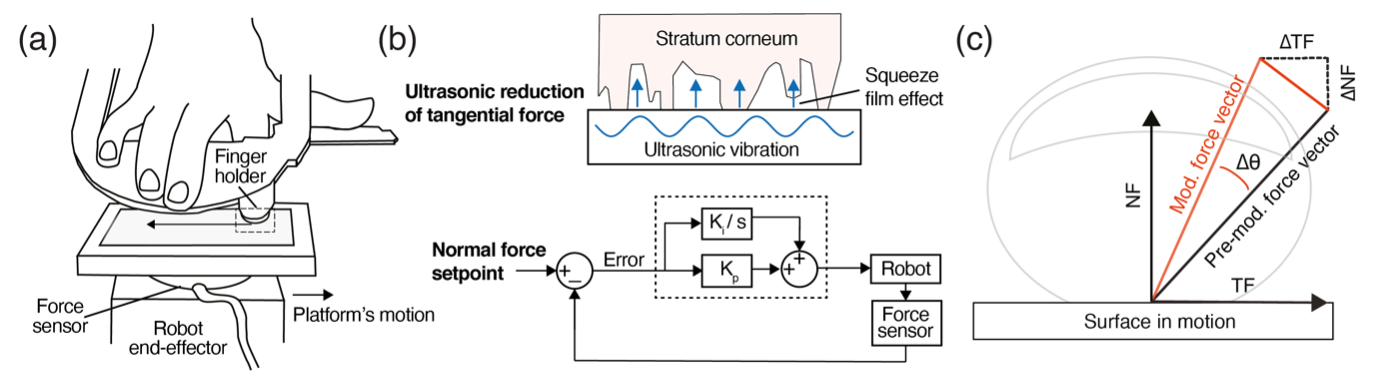
(a) The experimental apparatus used to move the surface under the finger. (b) Upper: tangential force (TF) is modulated by ultrasonic vibrations that create a microscale air film between the surface and the skin and thereby reduce the finger-surface friction. Lower: diagram of the controller that modulates normal force (NF). (c) Illustration of the modulation of the contact-force vector when changes are induced.
The contact forces we experience when our body interacts with objects provide essential sensory cues that help us understand the world and adapt our behavior. Sliding contact in particular arises in most daily activities, for example, when we feel the smoothness of fabric before buying clothing or when we slide our finger against the screen of a smartphone to move between pictures.
Humans are very sensitive to frictional changes while sliding the fingertip across a flat surface. Despite these observations, it is unclear how the three-dimensional mechanical deformations induced by haptic exploration are processed by different skin receptors and the brain. This collaborative project with UCLouvain aims to quantify the respective contributions of the normal force and the tangential force to the human perception of tactile stimulation. We induce variations of the normal force with a force-controlled robotic platform during passive stimulation of the finger while simultaneously modulating the tangential force with an ultrasonic haptic display that can reduce the finger-surface friction. By coupling these two technologies, we can generate independent variations of the normal and tangential force components that do not occur during natural interactions [ ].
The first result of these experiments showed that humans detect changes in the normal force without interference from the concomitant tangential force variations [ ]; however, we also found a higher sensory threshold than is usually observed for force perception. A second study showed that humans most probably rely on the amplitude of the three-dimensional force vector to perceive changes in the contact force on their skin, rather than previously hypothesized metrics like the coefficient of friction. These studies elucidated which parameters are the most efficient at conveying force cues to the human brain, a result that can both explain and benefit the design of haptic interfaces.