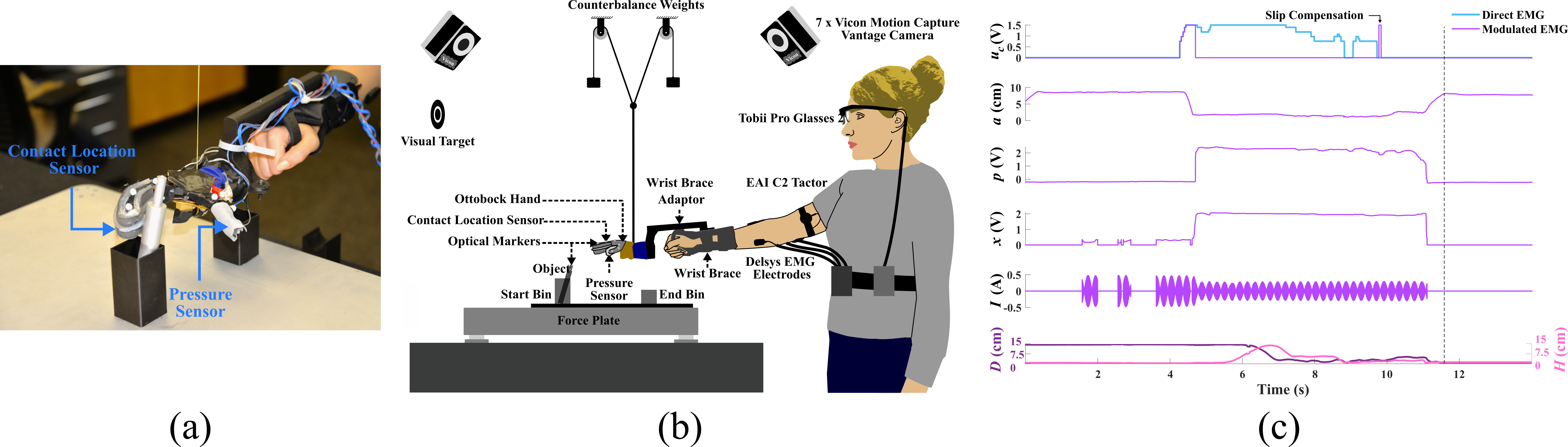
The studied task required the user to pick up and move the metal cylinder using a myoelectric prosthesis in the absence of direct vision. (a) Ottobock SensorHand Speed featuring custom-built contact-location and pressure sensors. (b) Experimental setup including an adapter and counterbalance weights to allow use by non-amputee individuals. (c) Traces of select signals from a participant who received vibrotactile feedback and used the prosthesis with reflexes enabled. From top to bottom: raw and reflex-modulated motor command to close the prosthetic hand, hand aperture, pressure sensor, contact-location sensor, current to vibrotactor, and lastly, the distance of the object to the end bin (purple line) and height of the object (pink line).
Upper-limb loss prevents amputees from being able to carry out many day-to-day tasks that are necessary for ensuring a good quality of life. Although commercially available prosthetic limbs can replace some of the lost motor function of the healthy limb, the lack of sensory feedback causes amputees to rely heavily on vision to estimate haptic information like contact, slip, and stiffness. This visual crutch prevents object manipulation in a variety of scenarios that healthy individuals take for granted. For example, being able to pick up a pen from a desk while watching a lecture is a task amputees would be unable to do due to a lack of haptic sensation.
For a prosthesis user to pick up an object without direct vision, we hypothesized that they would need to know where on their prosthetic hand they are touching the object, so that they can appropriately adjust the orientation and placement of their hand. We further hypothesized that imbuing a prosthesis with its own reflexes to prevent adverse events like object slip or excessive grasping force can also improve the performance of dexterous tasks. To realize such a system, we built a pressure sensor for use in the autonomous control loop and developed a novel contact-location sensor. This sensor’s signals provide a continuous indication of single-site contact location, which can be fed back to the user in a variety of ways, such as through vibrotactile feedback or distributed pressure feedback.
We investigated the ability of participants to use a myoelectric prosthesis in a reach-to-pick-and-place task without using direct vision. Several combinations of haptic feedback and reflex controllers were tested. Initial results comparing the standard myoelectric prosthesis to a prosthesis with reflex control and vibrotactile feedback show that the combination of tactile feedback and control significantly improve performance consistency [ ].