Calibrating a Soft ERT-Based Tactile Sensor with a Multiphysics Model and Sim-to-real Transfer Learning
2020
Conference Paper
al
hi
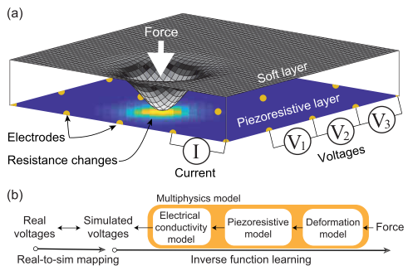
Tactile sensors based on electrical resistance tomography (ERT) have shown many advantages for implementing a soft and scalable whole-body robotic skin; however, calibration is challenging because pressure reconstruction is an ill-posed inverse problem. This paper introduces a method for calibrating soft ERT-based tactile sensors using sim-to-real transfer learning with a finite element multiphysics model. The model is composed of three simple models that together map contact pressure distributions to voltage measurements. We optimized the model parameters to reduce the gap between the simulation and reality. As a preliminary study, we discretized the sensing points into a 6 by 6 grid and synthesized single- and two-point contact datasets from the multiphysics model. We obtained another single-point dataset using the real sensor with the same contact location and force used in the simulation. Our new deep neural network architecture uses a de-noising network to capture the simulation-to-real gap and a reconstruction network to estimate contact force from voltage measurements. The proposed approach showed 82% hit rate for localization and 0.51 N of force estimation error performance in single-contact tests and 78.5% hit rate for localization and 5.0 N of force estimation error in two-point contact tests. We believe this new calibration method has the possibility to improve the sensing performance of ERT-based tactile sensors.
| Author(s): | Hyosang Lee and Hyunkyu Park and Gokhan Serhat and Huanbo Sun and Katherine J. Kuchenbecker |
| Book Title: | Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) |
| Pages: | 1632--1638 |
| Year: | 2020 |
| Month: | May |
| Department(s): | Autonomous Learning, Haptic Intelligence |
| Research Project(s): |
Efficient Large-Area Tactile Sensing for Robot Skin
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA40945.2020.9196732 |
| Event Name: | IEEE International Conference on Robotics and Automation (ICRA 2020) |
| Event Place: | Paris, France |
| ISBN: | 978-1-7281-7395-5 |
| State: | Published |
|
BibTex @inproceedings{Lee20-ICRA-Calibrating,
title = {Calibrating a Soft {ERT}-Based Tactile Sensor with a Multiphysics Model and Sim-to-real Transfer Learning},
author = {Lee, Hyosang and Park, Hyunkyu and Serhat, Gokhan and Sun, Huanbo and Kuchenbecker, Katherine J.},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1632--1638},
month = may,
year = {2020},
doi = {10.1109/ICRA40945.2020.9196732},
month_numeric = {5}
}
|
|