Robot Interaction Studio: A Platform for Unsupervised HRI
2021
Conference Paper
hi
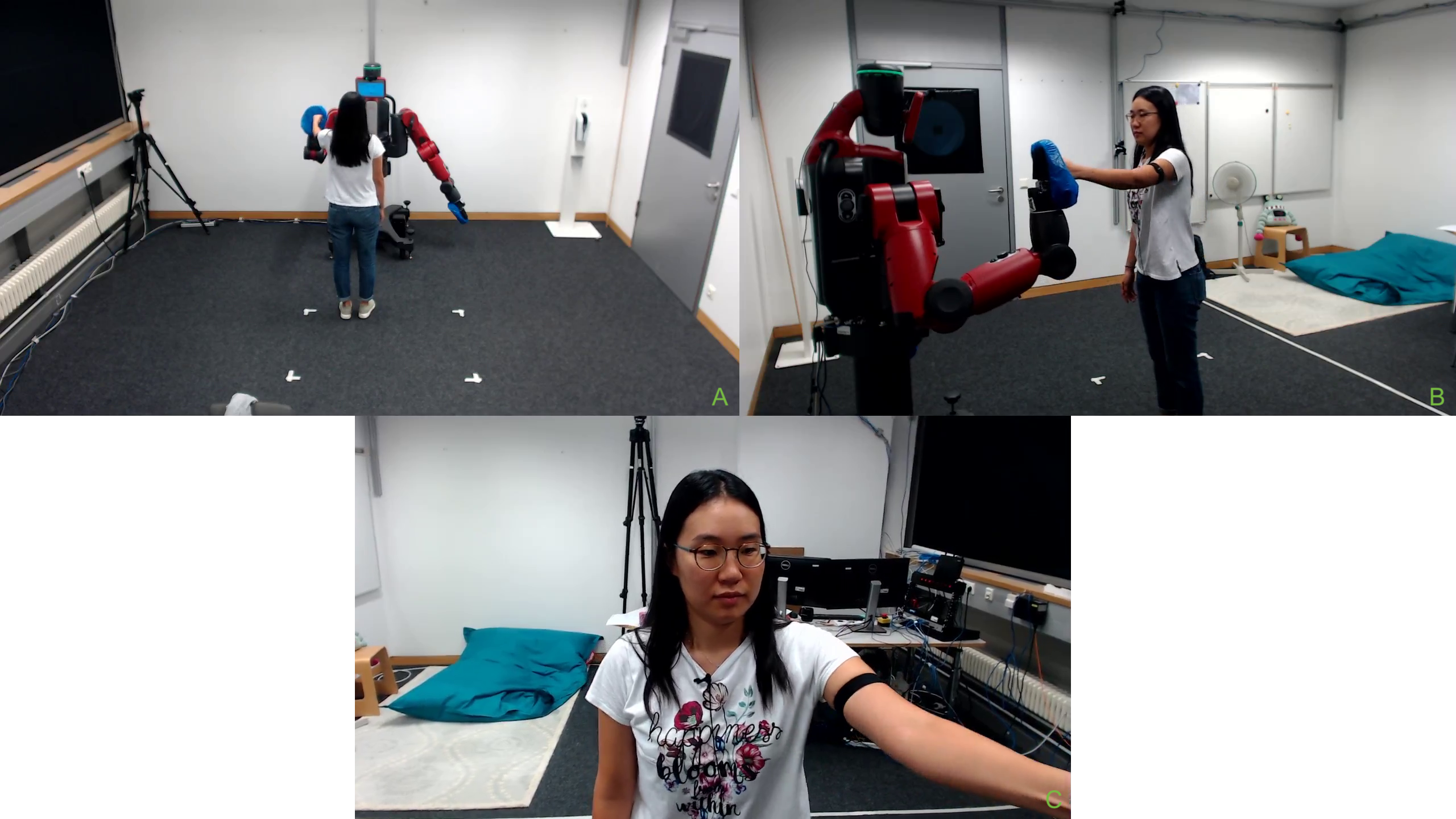
Robots hold great potential for supporting exercise and physical therapy, but such systems are often cumbersome to set up and require expert supervision. We aim to solve these concerns by combining Captury Live, a real-time markerless motion-capture system, with a Rethink Robotics Baxter Research Robot to create the Robot Interaction Studio. We evaluated this platform for unsupervised human-robot interaction (HRI) through a 75-minute-long user study with seven adults who were given minimal instructions and no feedback about their actions. The robot used sounds, facial expressions, facial colors, head motions, and arm motions to sequentially present three categories of cues in randomized order while constantly rotating its face screen to look at the user. Analysis of the captured user motions shows that the cue type significantly affected the distance subjects traveled and the amount of time they spent within the robot’s reachable workspace, in alignment with the design of the cues. Heat map visualizations of the recorded user hand positions confirm that users tended to mimic the robot’s arm poses. Despite some initial frustration, taking part in this study did not significantly change user opinions of the robot. We reflect on the advantages of the proposed approach to unsupervised HRI as well as the limitations and possible future extensions of our system.
| Author(s): | Mayumi Mohan and Cara M. Nunez and Katherine J. Kuchenbecker |
| Book Title: | Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) |
| Year: | 2021 |
| Month: | May |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Teleoperating Max's Head and Arms
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA48506.2021.9561292 |
| Address: | Xian, China |
| State: | Published |
|
BibTex @inproceedings{Mohan21-ICRA-Studio,
title = {Robot {I}nteraction {S}tudio: A Platform for Unsupervised {HRI}},
author = {Mohan, Mayumi and Nunez, Cara M. and Kuchenbecker, Katherine J.},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
address = {Xian, China},
month = may,
year = {2021},
doi = {10.1109/ICRA48506.2021.9561292},
month_numeric = {5}
}
|
|