Sensorimotor-Inspired Tactile Feedback and Control Improve Consistency of Prosthesis Manipulation in the Absence of Direct Vision
2021
Conference Paper
hi
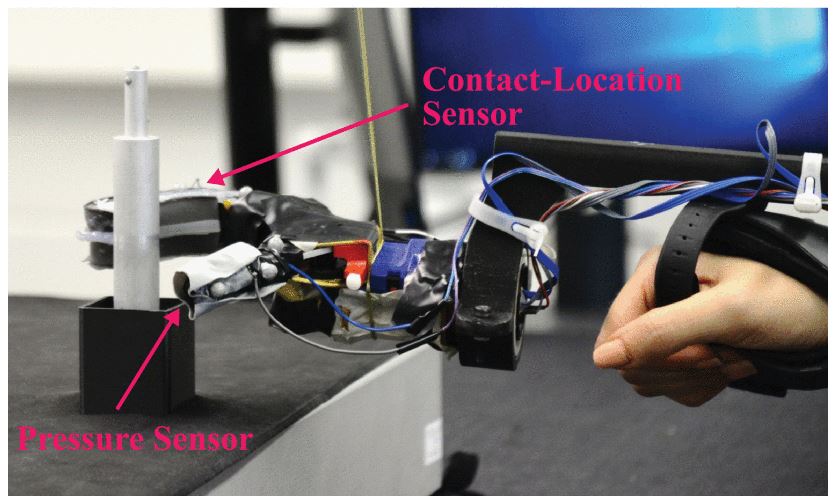
The lack of haptically aware upper-limb prostheses forces amputees to rely largely on visual cues to complete activities of daily living. In contrast, non-amputees inherently rely on conscious haptic perception and automatic tactile reflexes to govern volitional actions in situations that do not allow for constant visual attention. We therefore propose a myoelectric prosthesis system that reflects these concepts to aid manipulation performance without direct vision. To implement this design, we constructed two fabric-based tactile sensors that measure contact location along the palmar and dorsal sides of the prosthetic fingers and grasp pressure at the tip of the prosthetic thumb. Inspired by the natural sensorimotor system, we use the measurements from these sensors to provide vibrotactile feedback of contact location and implement a tactile grasp controller with reflexes that prevent over-grasping and object slip. We compare this tactile system to a standard myoelectric prosthesis in a challenging reach-to-pick-and-place task conducted without direct vision; 17 non-amputee adults took part in this single-session between-subjects study. Participants in the tactile group achieved more consistent high performance compared to participants in the standard group. These results show that adding contact-location feedback and reflex control increases the consistency with which objects can be grasped and moved without direct vision in upper-limb prosthetics
| Author(s): | Neha Thomas and Farimah Fazlollahi and Jeremy D. Brown and Katherine J. Kuchenbecker |
| Book Title: | Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
| Pages: | 6174--6181 |
| Year: | 2021 |
| Month: | September |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/IROS51168.2021.9635885 |
| Address: | Prague, Czech Republic |
| State: | Published |
|
BibTex @inproceedings{Thomas21-IROS-Sensorimotor,
title = {Sensorimotor-Inspired Tactile Feedback and Control Improve Consistency of Prosthesis Manipulation in the Absence of Direct Vision},
author = {Thomas, Neha and Fazlollahi, Farimah and Brown, Jeremy D. and Kuchenbecker, Katherine J.},
booktitle = {Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {6174--6181},
address = {Prague, Czech Republic},
month = sep,
year = {2021},
doi = {10.1109/IROS51168.2021.9635885},
month_numeric = {9}
}
|
|