
2024
Cao, C. G. L., Javot, B., Bhattarai, S., Bierig, K., Oreshnikov, I., Volchkov, V. V.
Fiber-Optic Shape Sensing Using Neural Networks Operating on Multispecklegrams
IEEE Sensors Journal, 24(17):27532-27540, September 2024 (article)
Sanchez-Tamayo, N., Yoder, Z., Rothemund, P., Ballardini, G., Keplinger, C., Kuchenbecker, K. J.
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Advanced Science, (2402461):1-14, September 2024 (article)

Tashiro, N., Faulkner, R., Melnyk, S., Rodriguez, T. R., Javot, B., Tahouni, Y., Cheng, T., Wood, D., Menges, A., Kuchenbecker, K. J.
Building Instructions You Can Feel: Edge-Changing Haptic Devices for Digitally Guided Construction
ACM Transactions on Computer-Human Interaction, September 2024 (article) Accepted
Sharon, Y., Nevo, T., Naftalovich, D., Bahar, L., Refaely, Y., Nisky, I.
Augmenting Robot-Assisted Pattern Cutting With Periodic Perturbations – Can We Make Dry Lab Training More Realistic?
IEEE Transactions on Biomedical Engineering, August 2024 (article)
Khojasteh, B., Solowjow, F., Trimpe, S., Kuchenbecker, K. J.
Multimodal Multi-User Surface Recognition with the Kernel Two-Sample Test
IEEE Transactions on Automation Science and Engineering, 21(3):4432-4447, July 2024 (article)
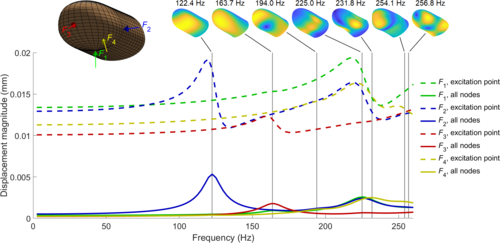
Serhat, G., Kuchenbecker, K. J.
Fingertip Dynamic Response Simulated Across Excitation Points and Frequencies
Biomechanics and Modeling in Mechanobiology, 23, pages: 1369-1376, May 2024 (article)
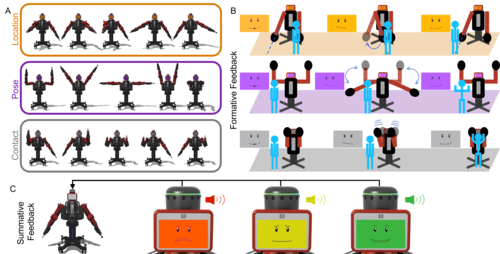
Mohan, M., Nunez, C. M., Kuchenbecker, K. J.
Closing the Loop in Minimally Supervised Human-Robot Interaction: Formative and Summative Feedback
Scientific Reports, 14(10564):1-18, May 2024 (article)
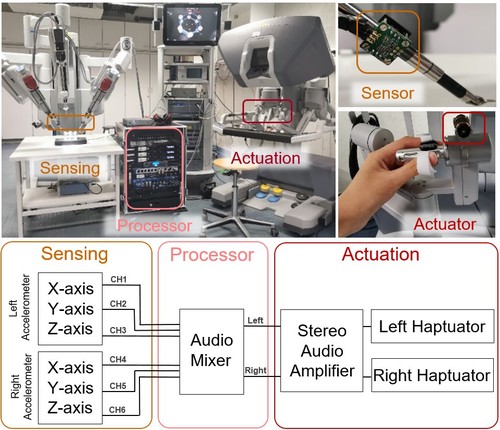
Gong, Y., Mat Husin, H., Erol, E., Ortenzi, V., Kuchenbecker, K. J.
AiroTouch: Enhancing Telerobotic Assembly through Naturalistic Haptic Feedback of Tool Vibrations
Frontiers in Robotics and AI, 11(1355205):1-15, May 2024 (article)
Allemang–Trivalle, A., Donjat, J., Bechu, G., Coppin, G., Chollet, M., Klaproth, O. W., Mitschke, A., Schirrmann, A., Cao, C. G. L.
Modeling Fatigue in Manual and Robot-Assisted Work for Operator 5.0
IISE Transactions on Occupational Ergonomics and Human Factors, 12(1-2):135-147, March 2024 (article)
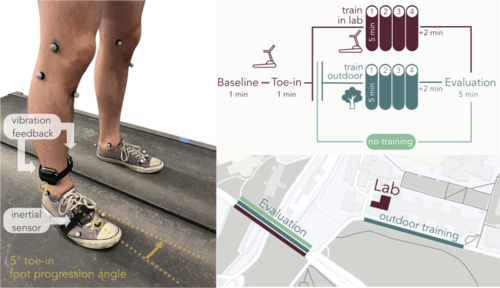
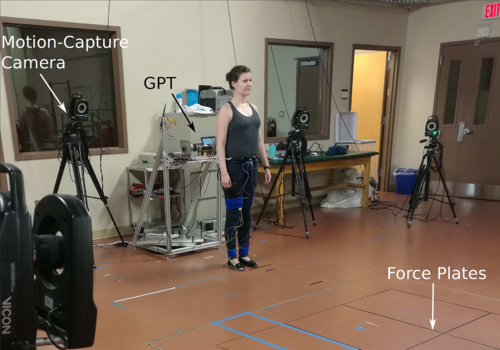
Rokhmanova, N., Pearl, O., Kuchenbecker, K. J., Halilaj, E.
IMU-Based Kinematics Estimation Accuracy Affects Gait Retraining Using Vibrotactile Cues
IEEE Transactions on Neural Systems and Rehabilitation Engineering, 32, pages: 1005-1012, February 2024 (article)
Fitter, N. T., Mohan, M., Preston, R. C., Johnson, M. J., Kuchenbecker, K. J.
How Should Robots Exercise with People? Robot-Mediated Exergames Win with Music, Social Analogues, and Gameplay Clarity
Frontiers in Robotics and AI, 10(1155837):1-18, January 2024 (article)
Khojasteh, B., Shao, Y., Kuchenbecker, K. J.
Robust Surface Recognition with the Maximum Mean Discrepancy: Degrading Haptic-Auditory Signals through Bandwidth and Noise
IEEE Transactions on Haptics, 17(1):58-65, January 2024, Presented at the IEEE Haptics Symposium (article)
2023
L’Orsa, R., Lama, S., Westwick, D., Sutherland, G., Kuchenbecker, K. J.
Towards Semi-Automated Pleural Cavity Access for Pneumothorax in Austere Environments
Acta Astronautica, 212, pages: 48-53, November 2023 (article)
Andrussow, I., Sun, H., Kuchenbecker, K. J., Martius, G.
Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation
Advanced Intelligent Systems, 5(8), August 2023, Inside back cover (article)
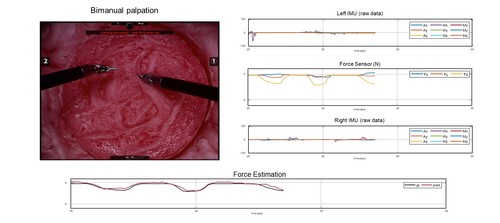
Lee, Y., Husin, H. M., Forte, M., Lee, S., Kuchenbecker, K. J.
Learning to Estimate Palpation Forces in Robotic Surgery From Visual-Inertial Data
IEEE Transactions on Medical Robotics and Bionics, 5(3):496-506, August 2023 (article)
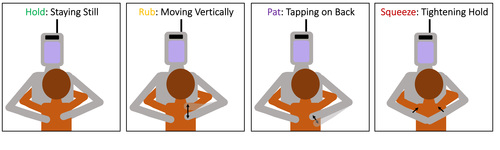
Block, A. E., Seifi, H., Hilliges, O., Gassert, R., Kuchenbecker, K. J.
In the Arms of a Robot: Designing Autonomous Hugging Robots with Intra-Hug Gestures
ACM Transactions on Human-Robot Interaction, 12(2):1-49, June 2023, Special Issue on Designing the Robot Body: Critical Perspectives on Affective Embodied Interaction (article)

Gertler, I., Serhat, G., Kuchenbecker, K. J.
Generating Clear Vibrotactile Cues with a Magnet Embedded in a Soft Finger Sheath
Soft Robotics, 10(3):624-635, June 2023 (article)
Fazlollahi, F., Kuchenbecker, K. J.
Haptify: A Measurement-Based Benchmarking System for Grounded Force-Feedback Devices
IEEE Transactions on Robotics, 39(2):1622-1636, April 2023 (article)
Brown, J. D., Kuchenbecker, K. J.
Effects of Automated Skill Assessment on Robotic Surgery Training
The International Journal of Medical Robotics and Computer Assisted Surgery, 19(2):e2492, April 2023 (article)
Spiers, A. J., Young, E., Kuchenbecker, K. J.
The S-BAN: Insights into the Perception of Shape-Changing Haptic Interfaces via Virtual Pedestrian Navigation
ACM Transactions on Computer-Human Interaction, 30(1):1-31, March 2023 (article)
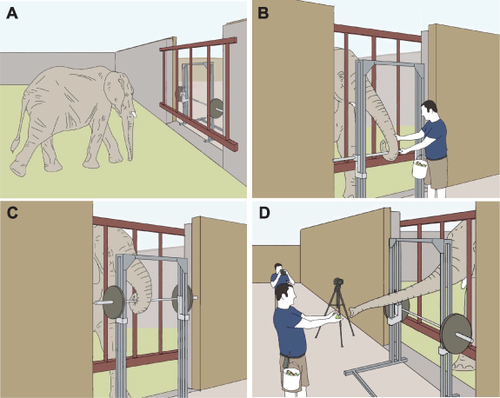
Schulz, A., Reidenberg, J., Wu, J. N., Tang, C. Y., Seleb, B., Mancebo, J., Elgart, N., Hu, D.
Elephant trunks use an adaptable prehensile grip
Bioinspiration and Biomimetics, 18(2), February 2023 (article)
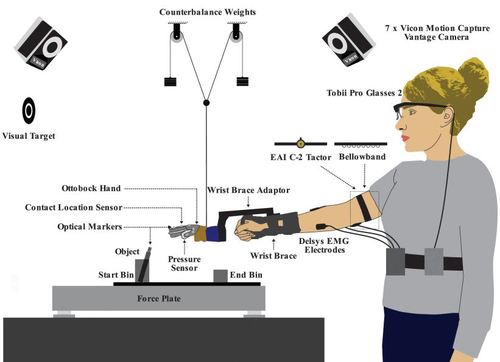
Thomas, N., Fazlollahi, F., Kuchenbecker, K. J., Brown, J. D.
The Utility of Synthetic Reflexes and Haptic Feedback for Upper-Limb Prostheses in a Dexterous Task Without Direct Vision
IEEE Transactions on Neural Systems and Rehabilitation Engineering, 31, pages: 169-179, January 2023 (article)
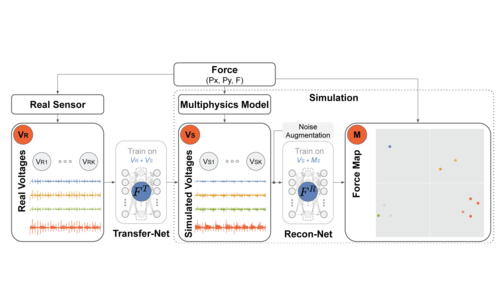
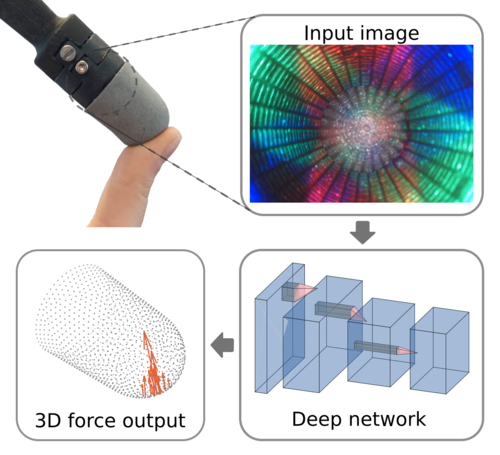
Lee, H., Sun, H., Park, H., Serhat, G., Javot, B., Martius, G., Kuchenbecker, K. J.
Predicting the Force Map of an ERT-Based Tactile Sensor Using Simulation and Deep Networks
IEEE Transactions on Automation Science and Engineering, 20(1):425-439, January 2023 (article)
2022
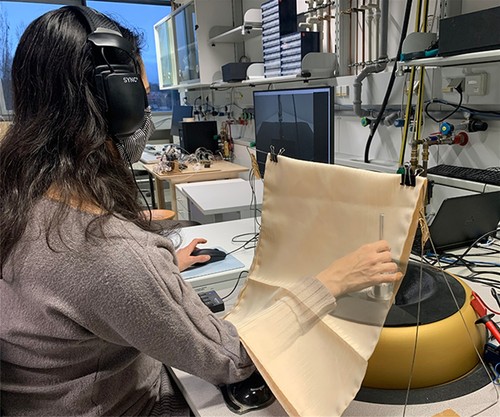
Richardson, B. A., Vardar, Y., Wallraven, C., Kuchenbecker, K. J.
Learning to Feel Textures: Predicting Perceptual Similarities from Unconstrained Finger-Surface Interactions
IEEE Transactions on Haptics, 15(4):705-717, October 2022, Benjamin A. Richardson and Yasemin Vardar contributed equally to this publication. (article)
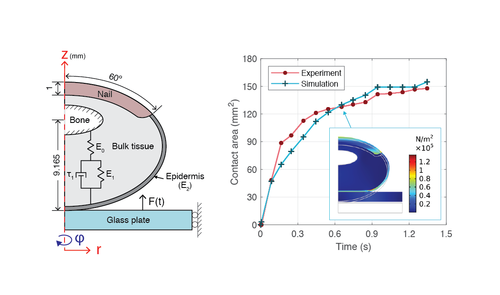
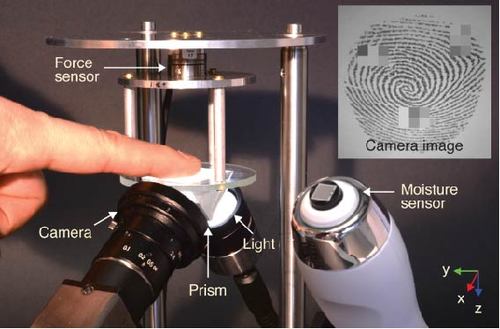
Serhat, G., Vardar, Y., Kuchenbecker, K. J.
Contact Evolution of Dry and Hydrated Fingertips at Initial Touch
PLOS ONE, 17(7):e0269722, July 2022, Gokhan Serhat and Yasemin Vardar contributed equally to this publication. (article)
Lee, H., Tombak, G. I., Park, G., Kuchenbecker, K. J.
Perceptual Space of Algorithms for Three-to-One Dimensional Reduction of Realistic Vibrations
IEEE Transactions on Haptics, 15(3):521-534, July 2022 (article)
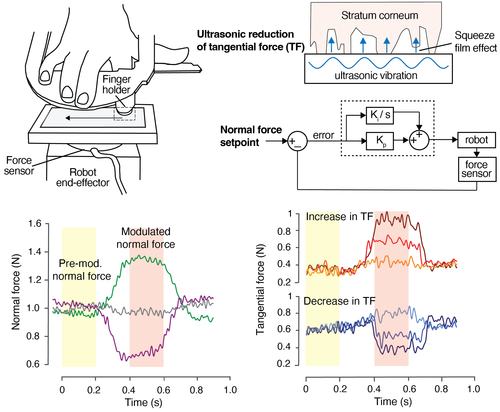
Gueorguiev, D., Lambert, J., Thonnard, J., Kuchenbecker, K. J.
Normal and Tangential Forces Combine to Convey Contact Pressure During Dynamic Tactile Stimulation
Scientific Reports, 12, pages: 8215, May 2022 (article)
Rokhmanova, N., Kuchenbecker, K. J., Shull, P. B., Ferber, R., Halilaj, E.
Predicting Knee Adduction Moment Response to Gait Retraining with Minimal Clinical Data
PLOS Computational Biology, 18(5):e1009500, May 2022 (article)

Forte, M., Gourishetti, R., Javot, B., Engler, T., Gomez, E. D., Kuchenbecker, K. J.
Design of Interactive Augmented Reality Functions for Robotic Surgery and Evaluation in Dry-Lab Lymphadenectomy
The International Journal of Medical Robotics and Computer Assisted Surgery, 18(2):e2351, April 2022 (article)

Burns, R. B., Lee, H., Seifi, H., Faulkner, R., Kuchenbecker, K. J.
Endowing a NAO Robot with Practical Social-Touch Perception
Frontiers in Robotics and AI, 9, pages: 840335, April 2022 (article)
Park, K., Lee, H., Kuchenbecker, K. J., Kim, J.
Adaptive Optimal Measurement Algorithm for ERT-Based Large-Area Tactile Sensors
IEEE/ASME Transactions on Mechatronics, 27(1):304-314, February 2022 (article)
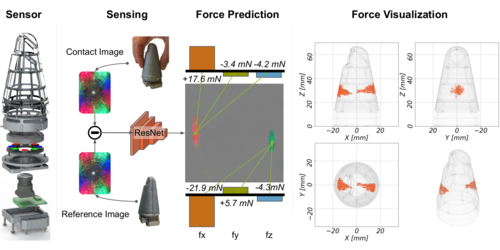
Sun, H., Kuchenbecker, K. J., Martius, G.
A Soft Thumb-Sized Vision-Based Sensor with Accurate All-Round Force Perception
Nature Machine Intelligence, 4(2):135-145, February 2022 (article)
Gourishetti, R., Kuchenbecker, K. J.
Evaluation of Vibrotactile Output from a Rotating Motor Actuator
IEEE Transactions on Haptics, 15(1):39-44, January 2022, Presented at the IEEE Haptics Symposium (article)
2021
Ambron, E., Buxbaum, L. J., Miller, A., Stoll, H., Kuchenbecker, K. J., Coslett, H. B.
Virtual Reality Treatment Displaying the Missing Leg Improves Phantom Limb Pain: A Small Clinical Trial
Neurorehabilitation and Neural Repair, 35(12):1100-1111, December 2021 (article)
Hu, S., Mendonca, R., Johnson, M. J., Kuchenbecker, K. J.
Robotics for Occupational Therapy: Learning Upper-Limb Exercises From Demonstrations
IEEE Robotics and Automation Letters, 6(4):7781-7788, October 2021 (article)
Hu, S., Fjeld, K., Vasudevan, E. V., Kuchenbecker, K. J.
A Brake-Based Overground Gait Rehabilitation Device for Altering Propulsion Impulse Symmetry
Sensors, 21(19):6617, October 2021 (article)
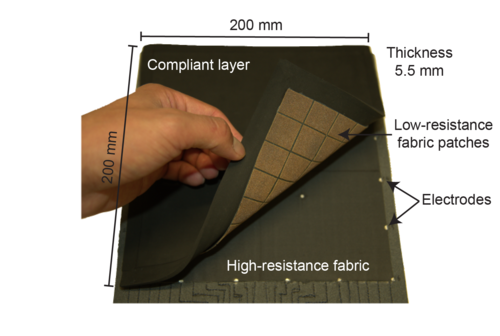
Lee, H., Park, K., Kim, J., Kuchenbecker, K. J.
Piezoresistive Textile Layer and Distributed Electrode Structure for Soft Whole-Body Tactile Skin
Smart Materials and Structures, 30(8):085036, July 2021, Hyosang Lee and Kyungseo Park contributed equally to this publication. (article)
Serhat, G., Kuchenbecker, K. J.
Free and Forced Vibration Modes of the Human Fingertip
Applied Sciences, 11(12):5709, June 2021 (article)
Nam, S., Kuchenbecker, K. J.
Optimizing a Viscoelastic Finite Element Model to Represent the Dry, Natural, and Moist Human Finger Pressing on Glass
IEEE Transactions on Haptics, 14(2):303-309, IEEE, May 2021, Presented at the IEEE World Haptics Conference (WHC) (article)
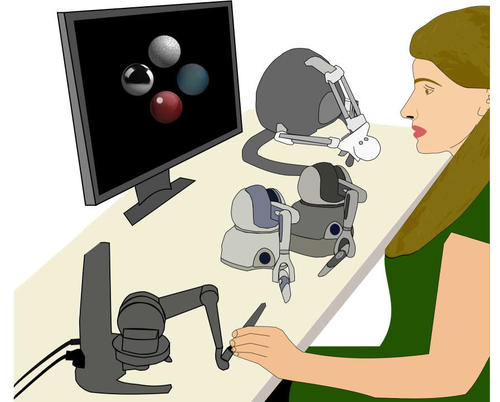
Caccianiga, G., Mariani, A., Galli de Paratesi, C., Menciassi, A., De Momi, E.
Multi-Sensory Guidance and Feedback for Simulation-Based Training in Robot Assisted Surgery: A Preliminary Comparison of Visual, Haptic, and Visuo-Haptic
IEEE Robotics and Automation Letters, 6(2):3801-3808, April 2021 (article)

Vardar, Y., Kuchenbecker, K. J.
Finger Motion and Contact by a Second Finger Influence the Tactile Perception of Electrovibration
Journal of the Royal Society Interface, 18(176):20200783, March 2021 (article)
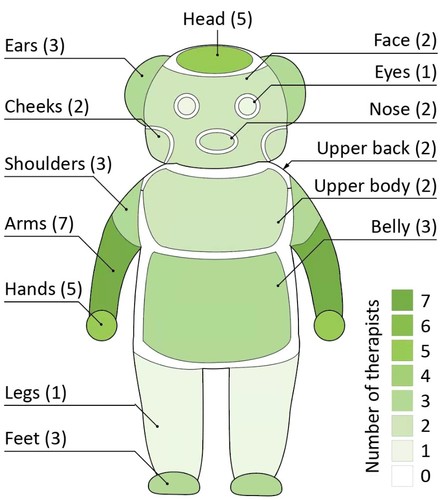
Burns, R. B., Seifi, H., Lee, H., Kuchenbecker, K. J.
Getting in Touch with Children with Autism: Specialist Guidelines for a Touch-Perceiving Robot
Paladyn. Journal of Behavioral Robotics, 12(1):115-135, January 2021 (article)
2020
Spiers, A. J., Morgan, A. S., Srinivasan, K., Calli, B., Dollar, A. M.
Using a Variable-Friction Robot Hand to Determine Proprioceptive Features for Object Classification During Within-Hand-Manipulation
IEEE Transactions on Haptics, 13(3):600-610, July 2020 (article)
Nam, S., Vardar, Y., Gueorguiev, D., Kuchenbecker, K. J.
Physical Variables Underlying Tactile Stickiness during Fingerpad Detachment
Frontiers in Neuroscience, 14, pages: 235, April 2020 (article)
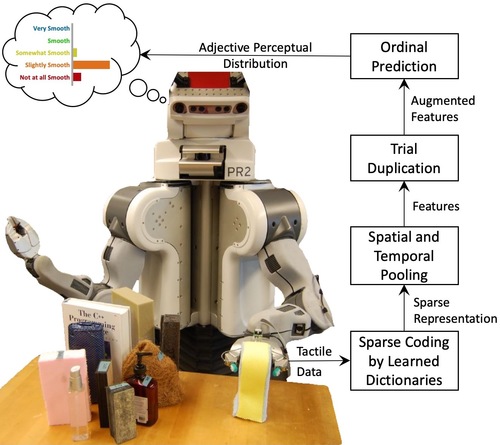
Richardson, B. A., Kuchenbecker, K. J.
Learning to Predict Perceptual Distributions of Haptic Adjectives
Frontiers in Neurorobotics, 13, pages: 1-16, February 2020 (article)
Fitter, N. T., Mohan, M., Kuchenbecker, K. J., Johnson, M. J.
Exercising with Baxter: Preliminary Support for Assistive Social-Physical Human-Robot Interaction
Journal of NeuroEngineering and Rehabilitation, 17, pages: 1-22, February 2020 (article)
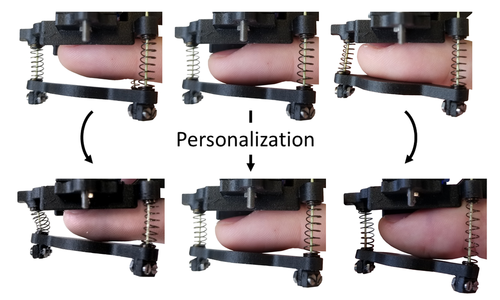
Young, E. M., Gueorguiev, D., Kuchenbecker, K. J., Pacchierotti, C.
Compensating for Fingertip Size to Render Tactile Cues More Accurately
IEEE Transactions on Haptics, 13(1):144-151, January 2020, Katherine J. Kuchenbecker and Claudio Pacchierotti contributed equally to this publication. Presented at the IEEE World Haptics Conference (WHC). (article)
2019
Hu, S., Kuchenbecker, K. J.
Hierarchical Task-Parameterized Learning from Demonstration for Collaborative Object Movement
Applied Bionics and Biomechanics, (9765383), December 2019 (article)
Park, K., Kim, S., Lee, H., Park, I., Kim, J.
Low-Hysteresis and Low-Interference Soft Tactile Sensor Using a Conductive Coated Porous Elastomer and a Structure for Interference Reduction
Sensors and Actuators A: Physical, 295, pages: 541-550, August 2019 (article)
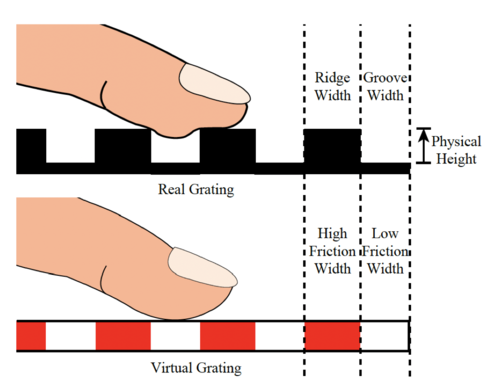
Isleyen, A., Vardar, Y., Basdogan, C.
Tactile Roughness Perception of Virtual Gratings by Electrovibration
IEEE Transactions on Haptics, 13(3):562-570, July 2019 (article)