A Brake-Based Overground Gait Rehabilitation Device for Altering Propulsion Impulse Symmetry
2021
Article
hi
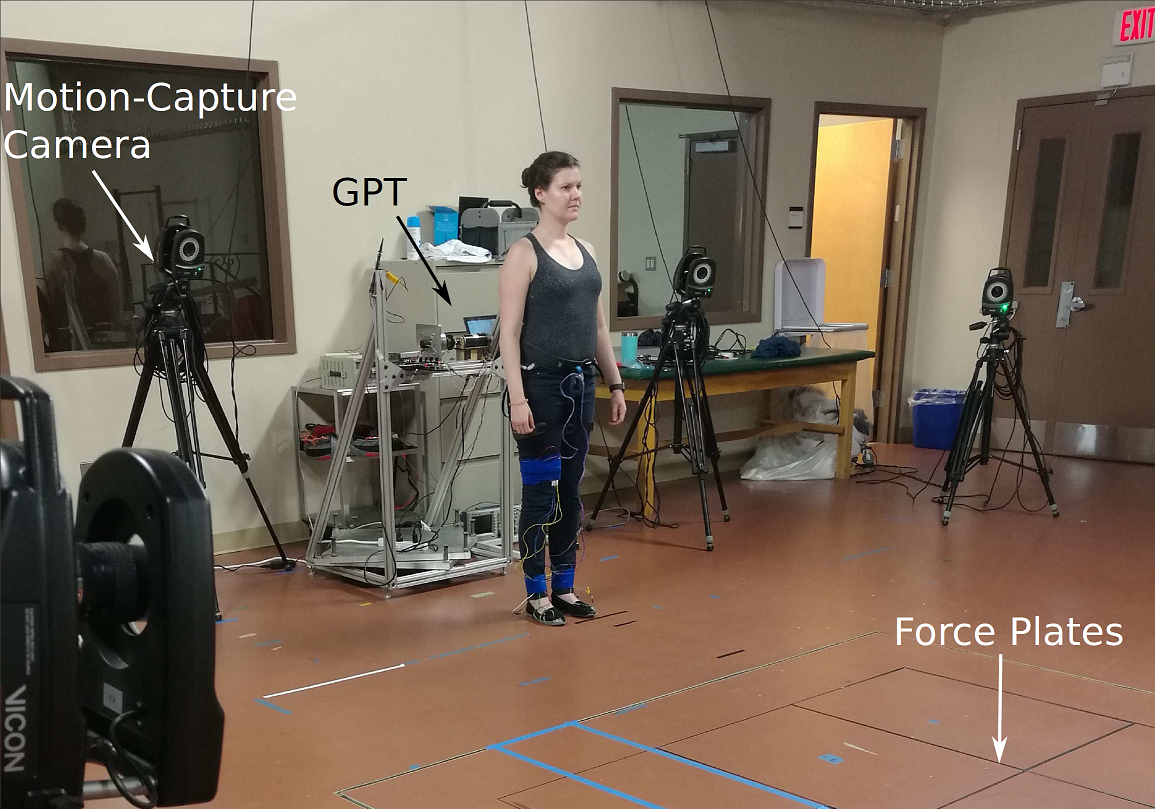
This paper introduces a new device for gait rehabilitation, the gait propulsion trainer (GPT). It consists of two main components (a stationary device and a wearable system) that work together to apply periodic stance-phase resistance as the user walks overground. The stationary device provides the resistance forces via a cable that tethers the user's pelvis to a magnetic-particle brake. The wearable system detects gait events via foot switches to control the timing of the resistance forces. A hardware verification test confirmed that the GPT functions as intended. We conducted a pilot study in which one healthy adult and one stroke survivor walked with the GPT with increasing resistance levels. As hypothesized, the periodic stance-phase resistance caused the healthy participant to walk asymmetrically, with greatly reduced propulsion impulse symmetry; as GPT resistance increased, the walking speed also decreased, and the propulsion impulse appeared to increase for both legs. In contrast, the stroke participant responded to GPT resistance by walking faster and more symmetrically in terms of both propulsion impulse and step length. Thus, this paper shows promising results of short-term training with the GPT, and more studies will follow to explore its long-term effects on hemiparetic gait.
| Author(s): | Siyao Hu and Krista Fjeld and Erin V. Vasudevan and Katherine J. Kuchenbecker |
| Journal: | Sensors |
| Volume: | 21 |
| Number (issue): | 19 |
| Pages: | 6617 |
| Year: | 2021 |
| Month: | October |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Gait Rehabilitation Through Haptic Feedback
|
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.3390/s21196617 |
| State: | Published |
|
BibTex @article{Hu21-S-Brake,
title = {A Brake-Based Overground Gait Rehabilitation Device for Altering Propulsion Impulse Symmetry},
author = {Hu, Siyao and Fjeld, Krista and Vasudevan, Erin V. and Kuchenbecker, Katherine J.},
journal = {Sensors},
volume = {21},
number = {19},
pages = {6617},
month = oct,
year = {2021},
doi = {10.3390/s21196617},
month_numeric = {10}
}
|
|