
2024
L’Orsa, R., Bisht, A., Yu, L., Murari, K., Westwick, D. T., Sutherland, G. R., Kuchenbecker, K. J.
Reflectance Outperforms Force and Position in Model-Free Needle Puncture Detection
In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, USA, July 2024 (inproceedings) Accepted
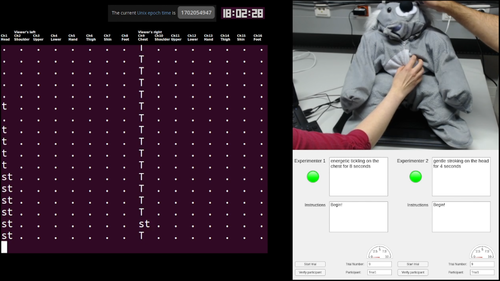
Mohan, M., Mat Husin, H., Kuchenbecker, K. J.
Expert Perception of Teleoperated Social Exercise Robots
In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages: 769-773, Boulder, USA, March 2024, Late-Breaking Report (LBR) (5 pages) presented at the IEEE/ACM International Conference on Human-Robot Interaction (HRI) (inproceedings)
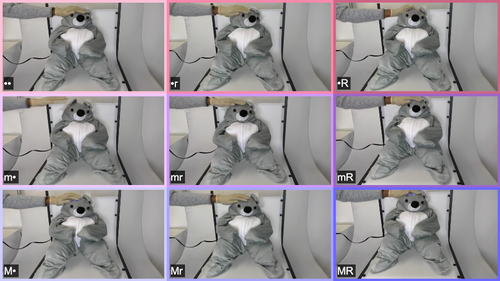
Burns, R.
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
University of Tübingen, Tübingen, Germany, February 2024, Department of Computer Science (phdthesis)
2023
Mohan, M.
Gesture-Based Nonverbal Interaction for Exercise Robots
University of Tübingen, Tübingen, Germany, October 2023, Department of Computer Science (phdthesis)
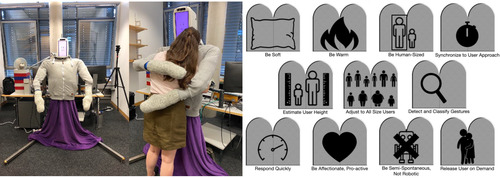
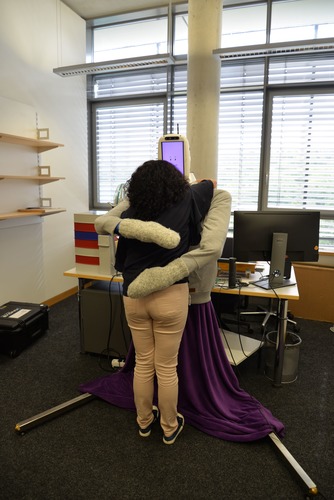
Burns, R. B., Ojo, F., Kuchenbecker, K. J.
Wear Your Heart on Your Sleeve: Users Prefer Robots with Emotional Reactions to Touch and Ambient Moods
In Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pages: 1914-1921, Busan, South Korea, August 2023 (inproceedings)
Gong, Y., Javot, B., Lauer, A. P. R., Sawodny, O., Kuchenbecker, K. J.
Naturalistic Vibrotactile Feedback Could Facilitate Telerobotic Assembly on Construction Sites
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 169-175, Delft, The Netherlands, July 2023 (inproceedings)
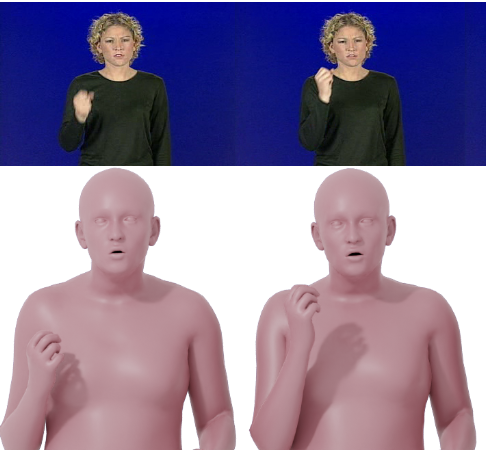
Forte, M., Kulits, P., Huang, C. P., Choutas, V., Tzionas, D., Kuchenbecker, K. J., Black, M. J.
Reconstructing Signing Avatars from Video Using Linguistic Priors
In IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), pages: 12791-12801, CVPR 2023, June 2023 (inproceedings)
2022
Richardson, B.
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
University of Stuttgart, Stuttgart, Germany, December 2022, Faculty of Computer Science, Electrical Engineering and Information Technology (phdthesis)
Nam, S.
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
University of Tübingen, Tübingen, Germany, October 2022, Department of Computer Science (phdthesis)
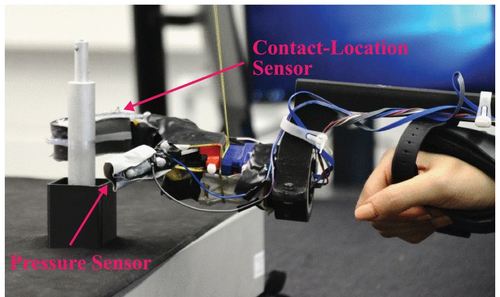
L’Orsa, R., Lama, S., Westwick, D., Sutherland, G., Kuchenbecker, K. J.
Towards Semi-Automated Pleural Cavity Access for Pneumothorax in Austere Environments
In Proceedings of the International Astronautical Congress (IAC), pages: 1-7, Paris, France, September 2022 (inproceedings)
Machaca, S., Cao, E., Chi, A., Adrales, G., Kuchenbecker, K. J., Brown, J. D.
Wrist-Squeezing Force Feedback Improves Accuracy and Speed in Robotic Surgery Training
In Proceedings of the IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), pages: 1-8, Seoul, Korea, August 2022 (inproceedings)
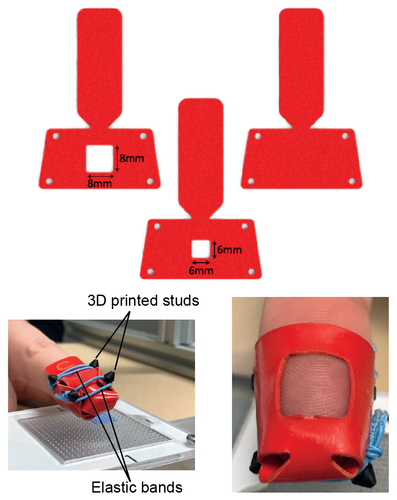
Gueorguiev, D., Javot, B., Spiers, A., Kuchenbecker, K. J.
Larger Skin-Surface Contact Through a Fingertip Wearable Improves Roughness Perception
In Haptics: Science, Technology, Applications, pages: 171-179, Lecture Notes in Computer Science, 13235, (Editors: Seifi, Hasti and Kappers, Astrid M. L. and Schneider, Oliver and Drewing, Knut and Pacchierotti, Claudio and Abbasimoshaei, Alireza and Huisman, Gijs and Kern, Thorsten A.), Springer, Cham, 13th International Conference on Human Haptic Sensing and Touch Enabled Computer Applications (EuroHaptics 2022), May 2022 (inproceedings)
Ortenzi, V., Filipovica, M., Abdlkarim, D., Pardi, T., Takahashi, C., Wing, A. M., Luca, M. D., Kuchenbecker, K. J.
Robot, Pass Me the Tool: Handle Visibility Facilitates Task-Oriented Handovers
In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages: 256-264, March 2022, Valerio Ortenzi and Maija Filipovica contributed equally to this publication. (inproceedings)
2021
Thomas, N., Fazlollahi, F., Brown, J. D., Kuchenbecker, K. J.
Sensorimotor-Inspired Tactile Feedback and Control Improve Consistency of Prosthesis Manipulation in the Absence of Direct Vision
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 6174-6181, Prague, Czech Republic, September 2021 (inproceedings)
Block, A. E.
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
ETH Zürich, Zürich, August 2021, Department of Computer Science (phdthesis)
Pardi, T., E., A. G., Ortenzi, V., Stolkin, R.
Optimal Grasp Selection, and Control for Stabilising a Grasped Object, with Respect to Slippage and External Forces
In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids 2020), pages: 429-436, Munich, Germany, July 2021 (inproceedings)
Abdlkarim, D., Ortenzi, V., Pardi, T., Filipovica, M., Wing, A. M., Kuchenbecker, K. J., Di Luca, M.
PrendoSim: Proxy-Hand-Based Robot Grasp Generator
In ICINCO 2021: Proceedings of the International Conference on Informatics in Control, Automation and Robotics, pages: 60-68, (Editors: Gusikhin, Oleg and Nijmeijer, Henk and Madani, Kurosh), SciTePress, Sétubal, 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), July 2021 (inproceedings)
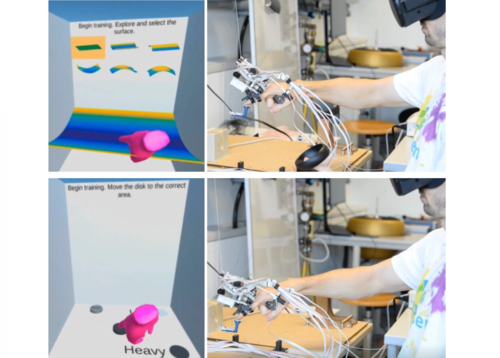
Young, E. M., Kuchenbecker, K. J.
Ungrounded Vari-Dimensional Tactile Fingertip Feedback for Virtual Object Interaction
In CHI ’21: Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, pages: 217, ACM, New York, NY, Conference on Human Factors in Computing Systems (CHI 2021), May 2021 (inproceedings)

Mohan, M., Nunez, C. M., Kuchenbecker, K. J.
Robot Interaction Studio: A Platform for Unsupervised HRI
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xian, China, May 2021 (inproceedings)
Block, A. E., Christen, S., Gassert, R., Hilliges, O., Kuchenbecker, K. J.
The Six Hug Commandments: Design and Evaluation of a Human-Sized Hugging Robot with Visual and Haptic Perception
In HRI ’21: Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, pages: 380-388, ACM, New York, NY, USA, ACM/IEEE International Conference on Human-Robot Interaction (HRI 2021), March 2021 (inproceedings)
2020
Young, E. M.
Delivering Expressive and Personalized Fingertip Tactile Cues
University of Pennsylvania, Philadelphia, PA, December 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
Fitter, N. T., Kuchenbecker, K. J.
Synchronicity Trumps Mischief in Rhythmic Human-Robot Social-Physical Interaction
In Robotics Research, 10, pages: 269-284, Springer Proceedings in Advanced Robotics, (Editors: Amato, Nancy M. and Hager, Greg and Thomas, Shawna and Torres-Torriti, Miguel), Springer, Cham, 18th International Symposium on Robotics Research (ISRR), 2020 (inproceedings)
Hu, S.
Modulating Physical Interactions in Human-Assistive Technologies
University of Pennsylvania, Philadelphia, PA, August 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
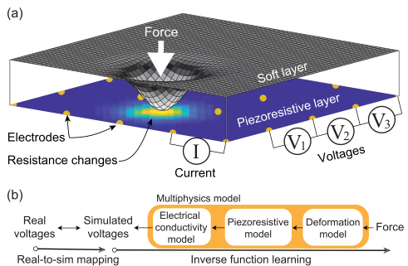
Lee, H., Park, H., Serhat, G., Sun, H., Kuchenbecker, K. J.
Calibrating a Soft ERT-Based Tactile Sensor with a Multiphysics Model and Sim-to-real Transfer Learning
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 1632-1638, IEEE International Conference on Robotics and Automation (ICRA 2020), May 2020 (inproceedings)
Park, K., Park, H., Lee, H., Park, S., Kim, J.
An ERT-Based Robotic Skin with Sparsely Distributed Electrodes: Structure, Fabrication, and DNN-Based Signal Processing
In 2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 1617-1624, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020), May 2020 (inproceedings)
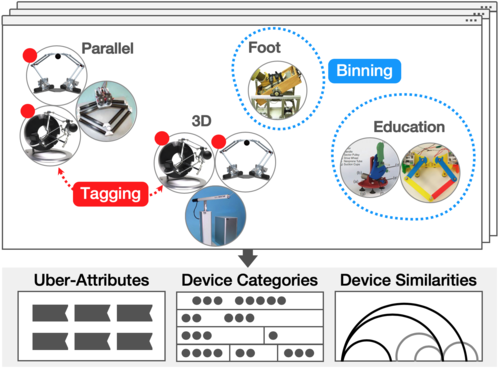
Seifi, H., Oppermann, M., Bullard, J., MacLean, K. E., Kuchenbecker, K. J.
Capturing Experts’ Mental Models to Organize a Collection of Haptic Devices: Affordances Outweigh Attributes
In Proceedings of the ACM SIGCHI Conference on Human Factors in Computing Systems (CHI), pages: 268, Conference on Human Factors in Computing Systems (CHI 2020), April 2020 (inproceedings)
Gueorguiev, D., Lambert, J., Thonnard, J., Kuchenbecker, K. J.
Changes in Normal Force During Passive Dynamic Touch: Contact Mechanics and Perception
In Proceedings of the IEEE Haptics Symposium (HAPTICS), pages: 746-752, IEEE Haptics Symposium (HAPTICS 2020), March 2020 (inproceedings)
Mohtasham, D., Narayanan, G., Calli, B., Spiers, A. J.
Haptic Object Parameter Estimation during Within-Hand-Manipulation with a Simple Robot Gripper
In Proceedings of the IEEE Haptics Symposium (HAPTICS), pages: 140-147, March 2020 (inproceedings)
2019
Park, H., Lee, H., Park, K., Mo, S., Kim, J.
Deep Neural Network Approach in Electrical Impedance Tomography-Based Real-Time Soft Tactile Sensor
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (999):7447-7452, IEEE, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 2019 (conference)
Jamalzadeh, M., Güçlü, B., Vardar, Y., Basdogan, C.
Effect of Remote Masking on Detection of Electrovibration
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 229-234, Tokyo, Japan, July 2019 (inproceedings)
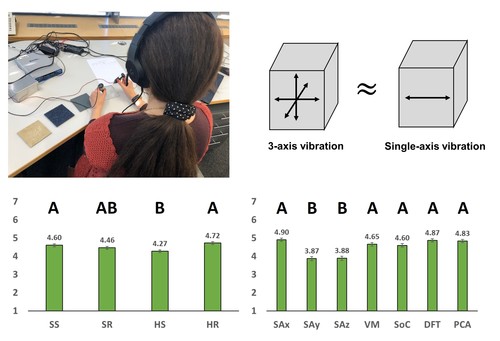
Park, G., Kuchenbecker, K. J.
Objective and Subjective Assessment of Algorithms for Reducing Three-Axis Vibrations to One-Axis Vibrations
In Proceedings of the IEEE World Haptics Conference, pages: 467-472, July 2019 (inproceedings)
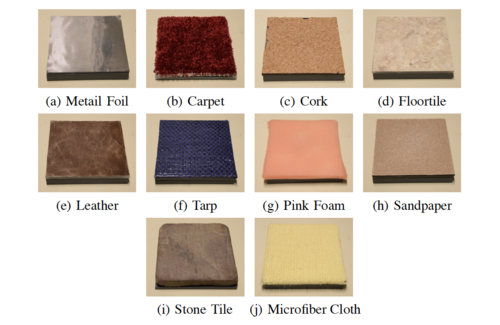
Vardar, Y., Wallraven, C., Kuchenbecker, K. J.
Fingertip Interaction Metrics Correlate with Visual and Haptic Perception of Real Surfaces
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 395-400, Tokyo, Japan, July 2019 (inproceedings)
Gloumakov, Y., Spiers, A. J., Dollar, A. M.
A Clustering Approach to Categorizing 7 Degree-of-Freedom Arm Motions during Activities of Daily Living
In Proceedings of the International Conference on Robotics and Automation (ICRA), pages: 7214-7220, Montreal, Canada, May 2019 (inproceedings)
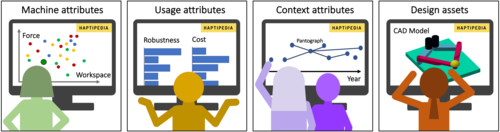
Seifi, H., Fazlollahi, F., Oppermann, M., Sastrillo, J. A., Ip, J., Agrawal, A., Park, G., Kuchenbecker, K. J., MacLean, K. E.
Haptipedia: Accelerating Haptic Device Discovery to Support Interaction & Engineering Design
In Proceedings of the ACM SIGCHI Conference on Human Factors in Computing Systems (CHI), pages: 1-12, Glasgow, Scotland, May 2019 (inproceedings)
Lee, H., Park, K., Kim, J., Kuchenbecker, K. J.
Internal Array Electrodes Improve the Spatial Resolution of Soft Tactile Sensors Based on Electrical Resistance Tomography
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 5411-5417, Montreal, Canada, May 2019, Hyosang Lee and Kyungseo Park contributed equally to this publication (inproceedings)
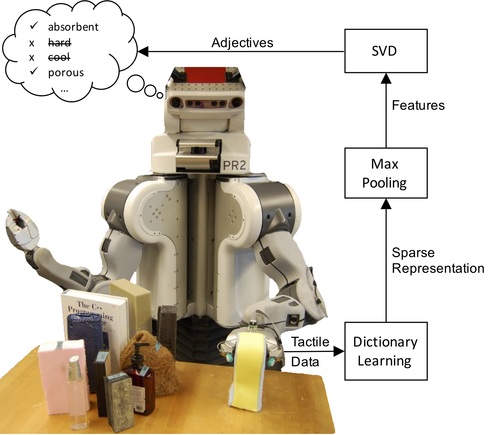
Richardson, B. A., Kuchenbecker, K. J.
Improving Haptic Adjective Recognition with Unsupervised Feature Learning
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 3804-3810, Montreal, Canada, May 2019 (inproceedings)

Fiedler, T., Vardar, Y.
A Novel Texture Rendering Approach for Electrostatic Displays
In Proceedings of International Workshop on Haptic and Audio Interaction Design (HAID), Lille, France, March 2019 (inproceedings)
2018
Kumar, A., Gourishetti, R., Manivannan, M.
A Feasibility Study of Force Feedback using Computer-Mouse
pages: 1-6, 26th Conference of National Academy of Psychology, December 2018 (conference)
Burka, A. L.
Instrumentation, Data, and Algorithms for Visually Understanding Haptic Surface Properties
University of Pennsylvania, Philadelphia, USA, August 2018, Department of Electrical and Systems Engineering (phdthesis)
Gourishetti, R., Isaac, J. H. R., Manivannan, M.
Passive Probing Perception: Effect of Latency in Visual-Haptic Feedback
In pages: 186-198, Springer, Cham, EuroHaptics, June 2018 (inproceedings)
2017
Kumar, A., Gourishetti, R., Manivannan, M.
Mechanics of pseudo-haptics with computer mouse
In pages: 1-6, IEEE, IEEE International Symposium on Haptic, Audio and Visual Environments and Games (HAVE), December 2017 (inproceedings)
Ng, C., Zareinia, K., Sun, Q., Kuchenbecker, K. J.
Stiffness Perception during Pinching and Dissection with Teleoperated Haptic Forceps
In Proceedings of the International Symposium on Robot and Human Interactive Communication (RO-MAN), pages: 456-463, Lisbon, Portugal, August 2017 (inproceedings)
Naomi T. Fitter
Design and Evaluation of Interactive Hand-Clapping Robots
University of Pennsylvania, August 2017, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
Young, E. M., Kuchenbecker, K. J.
Design of a Parallel Continuum Manipulator for 6-DOF Fingertip Haptic Display
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 599-604, Munich, Germany, June 2017, Finalist for best poster paper (inproceedings)
Hu, S., Kuchenbecker, K. J.
High Magnitude Unidirectional Haptic Force Display Using a Motor/Brake Pair and a Cable
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 394-399, Munich, Germany, June 2017 (inproceedings)
Brown, J. D., Fernandez, J. N., Cohen, S. P., Kuchenbecker, K. J.
A Wrist-Squeezing Force-Feedback System for Robotic Surgery Training
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 107-112, Munich, Germany, June 2017 (inproceedings)
Burka, A., Kuchenbecker, K. J.
Handling Scan-Time Parameters in Haptic Surface Classification
In Proceedings of the IEEE World Haptics Conference (WHC), pages: 424-429, Munich, Germany, June 2017 (inproceedings)
Burka, A., Rajvanshi, A., Allen, S., Kuchenbecker, K. J.
Proton 2: Increasing the Sensitivity and Portability of a Visuo-haptic Surface Interaction Recorder
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 439-445, Singapore, May 2017 (inproceedings)