Changes in Normal Force During Passive Dynamic Touch: Contact Mechanics and Perception
2020
Conference Paper
hi
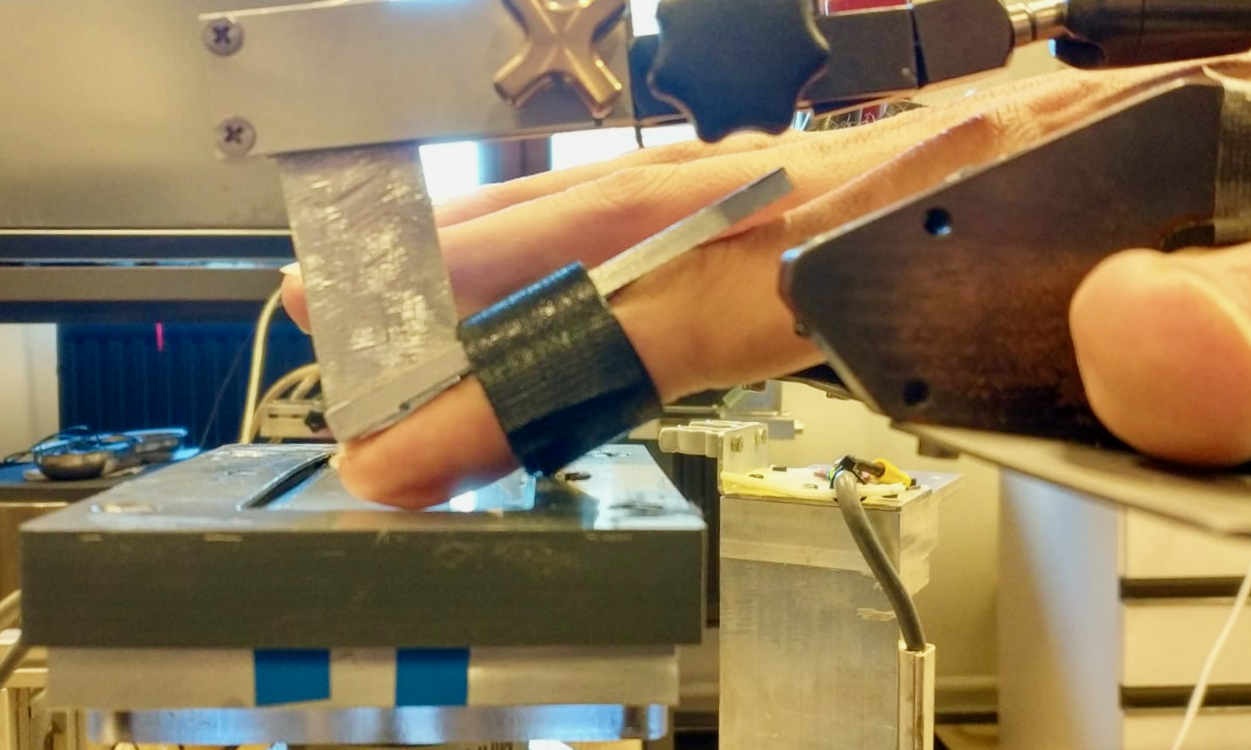
Using a force-controlled robotic platform, we investigated the contact mechanics and psychophysical responses induced by negative and positive modulations in normal force during passive dynamic touch. In the natural state of the finger, the applied normal force modulation induces a correlated change in the tangential force. In a second condition, we applied talcum powder to the fingerpad, which induced a significant modification in the slope of the correlated tangential change. In both conditions, the same ten participants had to detect the interval that contained a decrease or an increase in the pre-stimulation normal force of 1 N. In the natural state, the 75% just noticeable difference for this task was found to be a ratio of 0.19 and 0.18 for decreases and increases, respectively. With talcum powder on the fingerpad, the normal force thresholds remained stable, following the Weber law of constant just noticeable differences, while the tangential force thresholds changed in the same way as the correlation slopes. This result suggests that participants predominantly relied on the normal force changes to perform the detection task. In addition, participants were asked to report whether the force decreased or increased. Their performance was generally poor at this second task even for above-threshold changes. However, their accuracy slightly improved with the talcum powder, which might be due to the reduced finger-surface friction.
| Author(s): | David Gueorguiev and Julien Lambert and Jean-Louis Thonnard and Katherine J. Kuchenbecker |
| Book Title: | Proceedings of the IEEE Haptics Symposium (HAPTICS) |
| Pages: | 746--752 |
| Year: | 2020 |
| Month: | March |
| Department(s): | Haptic Intelligence |
| Research Project(s): | |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/HAPTICS45997.2020.ras.HAP20.19.f2b7107a |
| Event Name: | IEEE Haptics Symposium (HAPTICS 2020) |
| Event Place: | Crystal City, VA |
| ISBN: | 978-1-7281-0234-4 |
| State: | Published |
|
BibTex @inproceedings{Gueorguiev20-HS-Normal,
title = {Changes in Normal Force During Passive Dynamic Touch: Contact Mechanics and Perception},
author = {Gueorguiev, David and Lambert, Julien and Thonnard, Jean-Louis and Kuchenbecker, Katherine J.},
booktitle = {Proceedings of the IEEE Haptics Symposium (HAPTICS)},
pages = {746--752},
month = mar,
year = {2020},
doi = {10.1109/HAPTICS45997.2020.ras.HAP20.19.f2b7107a},
month_numeric = {3}
}
|
|