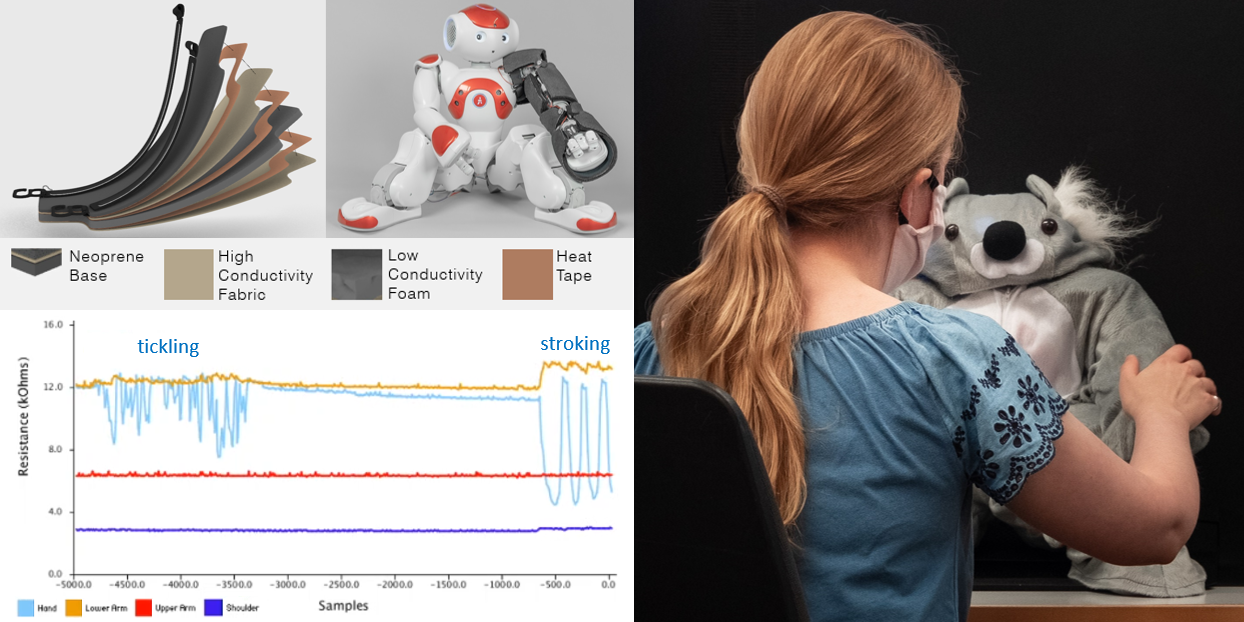
HERA's arm is fitted with custom fabric-based tactile sensors to detect social touch gestures. Left: These sensors are robust, easy to make, pleasant to touch, and sensitive to gestures such as tickling and stroking. Right: The sensors are secured on top of the robot’s plastic exterior and are hidden underneath a soft koala suit.
Social touch is a key aspect of our daily interactions with other people. We use social touch to gain attention, communicate needs, and convey emotions. However, children with autism may have difficulty utilizing social touch. They may be touch-averse and wary of contact with others. Alternatively, they may be touch-seeking and may unknowingly touch their interaction partner in an unsafe way, e.g., too tightly or too frequently. These children are often taught about safe touch by an occupational therapist or similar care professional. While the use of socially assistive robots as educational tools during therapy is increasingly gaining interest, these robots have very limited touch perception, if any at all.
Inspired by the successes of deep-touch pressure therapy and animal-assisted intervention in autism education and care, we propose a touch-perceiving robot animal for children with autism. Our research objective is to test the hypothesis that a robot animal augmented with tactile sensing can help children with autism learn safe and appropriate touch behavior during social interaction [ ]. We refer to this koala-like robot companion as the Haptic Empathetic Robot Animal, or HERA.
We established seven key touch-sensing guidelines that a therapy robot should meet through in-depth interviews with eleven autism specialists [ ]. For our initial robot prototype, we enclosed the commercially available humanoid robot NAO inside a koala suit. Based on our guidelines, we then created a tactile perception system composed of fabric-based tactile sensors [ ] and a gesture classification algorithm [ ]. This system can identify the social touch action and force level performed on the robot. HERA will react on both short-term and long-term time scales using an emotional response algorithm designed to reinforce appropriate social touch behavior [ ]. To further serve as an educational tool, HERA’s personality and behavior will be customizable to generate reactions appropriate for each child's learning needs.