Publication Type
- Article (148)
- Book Chapter (2)
- Conference Paper (159)
- Issue (1)
- MPI Year Book (2)
- Master Thesis (7)
- Miscellaneous (169)
- Patent (6)
- Ph.D. Thesis
2024

Engineering and Evaluating Naturalistic Vibrotactile Feedback for Telerobotic Assembly
2024
Gong, Y.
Engineering and Evaluating Naturalistic Vibrotactile Feedback for Telerobotic Assembly
University of Stuttgart, Stuttgart, Germany, August 2024, Faculty of Design, Production Engineering and Automotive Engineering (phdthesis)
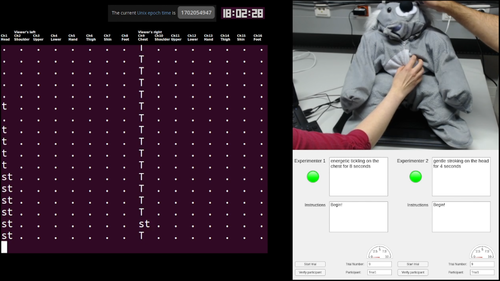
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
Burns, R.
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
University of Tübingen, Tübingen, Germany, February 2024, Department of Computer Science (phdthesis)
2023
Gesture-Based Nonverbal Interaction for Exercise Robots
2023
Mohan, M.
Gesture-Based Nonverbal Interaction for Exercise Robots
University of Tübingen, Tübingen, Germany, October 2023, Department of Computer Science (phdthesis)
2022
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
2022
Richardson, B.
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
University of Stuttgart, Stuttgart, Germany, December 2022, Faculty of Computer Science, Electrical Engineering and Information Technology (phdthesis)
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
Nam, S.
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
University of Tübingen, Tübingen, Germany, October 2022, Department of Computer Science (phdthesis)
2021
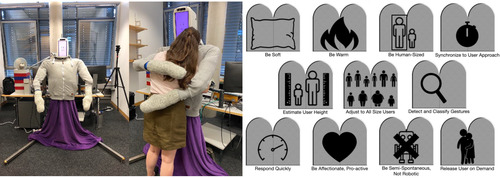
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
2021
Block, A. E.
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
ETH Zürich, Zürich, August 2021, Department of Computer Science (phdthesis)
2020
Delivering Expressive and Personalized Fingertip Tactile Cues
2020
Young, E. M.
Delivering Expressive and Personalized Fingertip Tactile Cues
University of Pennsylvania, Philadelphia, PA, December 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
Modulating Physical Interactions in Human-Assistive Technologies
Hu, S.
Modulating Physical Interactions in Human-Assistive Technologies
University of Pennsylvania, Philadelphia, PA, August 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
2018
Multi-objective Optimization of Nonconventional Laminated Composite Panels
Multi-objective Optimization of Nonconventional Laminated Composite Panels DOI [BibTex]
2018
Serhat, G.
Multi-objective Optimization of Nonconventional Laminated Composite Panels
Koc University, October 2018 (phdthesis)
Multi-objective Optimization of Nonconventional Laminated Composite Panels DOI [BibTex]
Instrumentation, Data, and Algorithms for Visually Understanding Haptic Surface Properties
Burka, A. L.
Instrumentation, Data, and Algorithms for Visually Understanding Haptic Surface Properties
University of Pennsylvania, Philadelphia, USA, August 2018, Department of Electrical and Systems Engineering (phdthesis)
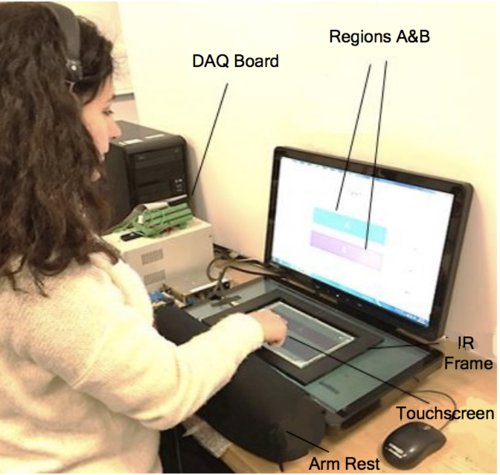
Tactile perception by electrovibration
Vardar, Y.
Tactile perception by electrovibration
Koc University, 2018 (phdthesis)
2017
Design and Evaluation of Interactive Hand-Clapping Robots
Naomi T. Fitter
University of Pennsylvania, August 2017, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
2017
Naomi T. Fitter
Design and Evaluation of Interactive Hand-Clapping Robots
University of Pennsylvania, August 2017, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
2006
Characterizing and Controlling the High-Frequency Dynamics of Haptic Interfaces
2006
Kuchenbecker, K. J.
Characterizing and Controlling the High-Frequency Dynamics of Haptic Interfaces
Stanford University, June 2006 (phdthesis)