HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
2021
Ph.D. Thesis
hi
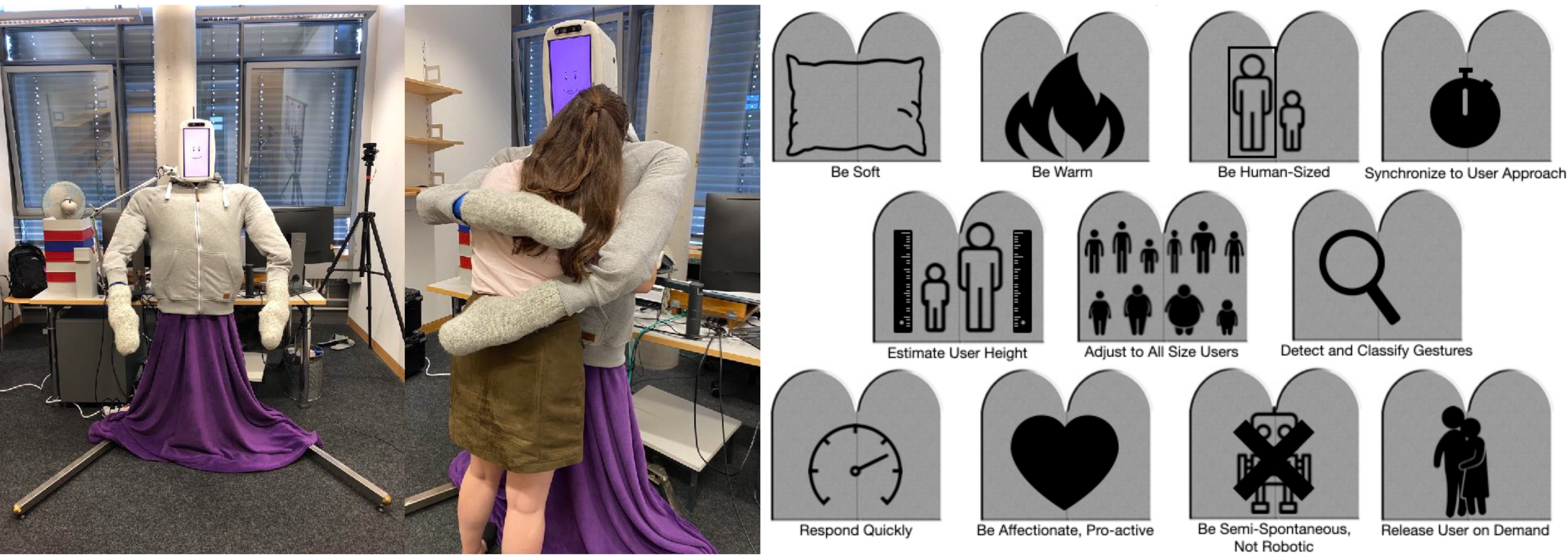
Hugs are one of the first forms of contact and affection humans experience. Receiving a hug is one of the best ways to feel socially supported, and the lack of social touch can have severe adverse effects on an individual's well-being. Due to the prevalence and health benefits of hugging, roboticists are interested in creating robots that can hug humans as seamlessly as humans hug other humans. However, hugs are complex affective interactions that need to adapt to the height, body shape, and preferences of the hugging partner, and they often include intra-hug gestures like squeezes. This dissertation aims to create a series of hugging robots that use visual and haptic perception to provide enjoyable interactive hugs. Each of the four presented HuggieBot versions is evaluated by measuring how users emotionally and behaviorally respond to hugging it; HuggieBot 4.0 is explicitly compared to a human hugging partner using physiological measures. Building on research both within and outside of human-robot interaction (HRI), this thesis proposes eleven tenets of natural and enjoyable robotic hugging. These tenets were iteratively crafted through a design process combining user feedback and experimenter observation, and they were evaluated through user studies. A good hugging robot should (1) be soft, (2) be warm, (3) be human-sized, (4) autonomously invite the user for a hug when it detects someone in its personal space, and then it should wait for the user to begin walking toward it before closing its arms to ensure a consensual and synchronous hugging experience. It should also (5) adjust its embrace to the user's size and position, (6) reliably release when the user wants to end the hug, and (7) perceive the user's height and adapt its arm positions accordingly to comfortably fit around the user at appropriate body locations. Finally, a hugging robot should (8) accurately detect and classify gestures applied to its torso in real time, regardless of the user's hand placement, (9) respond quickly to their intra-hug gestures, (10) adopt a gesture paradigm that blends user preferences with slight variety and spontaneity, and (11) occasionally provide unprompted, proactive affective social touch to the user through intra-hug gestures. We believe these eleven tenets are essential to delivering high-quality robot hugs. Their presence results in a hug that pleases the user, and their absence results in a hug that is likely to be inadequate. We present these tenets as guidelines for future hugging robot creators to follow when designing new hugging robots to ensure user acceptance. We tested the four versions of HuggieBot through six user studies. First, we analyzed data collected in a previous study with a modified Willow Garage Personal Robot 2 (PR2) to evaluate human responses to different robot physical characteristics and hugging behaviors. Participants experienced and evaluated twelve hugs with the robot, divided into three randomly ordered trials that focused on physical robot characteristics (single factor, three levels) and nine randomly ordered trials with low, medium, and high hug pressure and duration (two factors, three levels each). Second, we created an entirely new robotic platform, HuggieBot 2.0, according to our first six tenets. The new platform features a soft, warm, inflated body (HuggieChest) and uses visual and haptic sensing to deliver closed-loop hugging. We first verified the outward appeal of this platform compared to the previous PR2-based HuggieBot 1.0 via an online video-watching study involving 117 users. We then conducted an in-person experiment in which 32 users each exchanged eight hugs with HuggieBot 2.0, experiencing all combinations of visual hug initiation, haptic sizing, and haptic releasing. We then refine the original fourth tenet (visually perceive its user) and present the remaining five tenets for designing interactive hugging robots; we validate the full list of eleven tenets through more in-person studies with our custom robot. To enable perceptive and pleasing autonomous robot behavior, we investigated robot responses to four human intra-hug gestures: holding, rubbing, patting, and squeezing. The robot's inflated torso's microphone and pressure sensor collected data of 32 people repeatedly demonstrating these gestures, which were used to develop a perceptual algorithm that classifies user actions with 88% accuracy. From user preferences, we created a probabilistic behavior algorithm that chooses robot responses in real time. We implemented improvements to the robot platform to create a third version of our robot, HuggieBot 3.0. We then validated its gesture perception system and behavior algorithm in a fifth user study with 16 users. Finally, we refined the quality and comfort of the embrace by adjusting the joint torques and joint angles of the closed pose position, we further improved the robot's visual perception to detect changes in user approach, we upgraded the robot's response to users who do not press on its back, and we had the robot respond to all intra-hug gestures with squeezes to create our final version of the robotic platform, HuggieBot 4.0. In our sixth user study, we investigated the emotional and physiological effects of hugging a robot compared to the effects of hugging a friendly but unfamiliar person. We continuously monitored participant heart rate and collected saliva samples at seven time points across the 3.5-hour study to measure the temporal evolution of cortisol and oxytocin. We used an adapted Trier Social Stress Test (TSST) protocol to reliably and ethically induce stress in the participants. They then experienced one of five different hug intervention methods before all interacting with HuggieBot 4.0. The results of these six user studies validated our eleven hugging tenets and informed the iterative design of HuggieBot. We see that users enjoy robot softness, robot warmth, and being physically squeezed by the robot. Users dislike being released too soon from a hug and equally dislike being held by the robot for too long. Adding haptic reactivity definitively improves user perception of a hugging robot; the robot's responses and proactive intra-hug gestures were greatly enjoyed. In our last study, we learned that HuggieBot can positively affect users on a physiological level and is somewhat comparable to hugging a person. Participants have more favorable opinions about hugging robots after prolonged interaction with HuggieBot in all of our research studies.
| Author(s): | Alexis E. Block |
| Year: | 2021 |
| Month: | August |
| Day: | 12 |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
HuggieBot: Evolution of an Interactive Hugging Robot with Visual and Haptic Perception
|
| Bibtex Type: | Ph.D. Thesis (phdthesis) |
| Paper Type: | Thesis |
| Address: | Zürich |
| School: | ETH Zürich |
| Degree Type: | PhD |
| DOI: | 10.3929/ethz-b-000508212 |
| Note: | Department of Computer Science |
|
BibTex @phdthesis{Block21-PHD-HuggieBot,
title = {Huggie{B}ot: An Interactive Hugging Robot With Visual and Haptic Perception},
author = {Block, Alexis E.},
school = {ETH Zürich},
address = {Zürich},
month = aug,
year = {2021},
note = {Department of Computer Science},
doi = {10.3929/ethz-b-000508212},
month_numeric = {8}
}
|
|