Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
2024
Ph.D. Thesis
hi
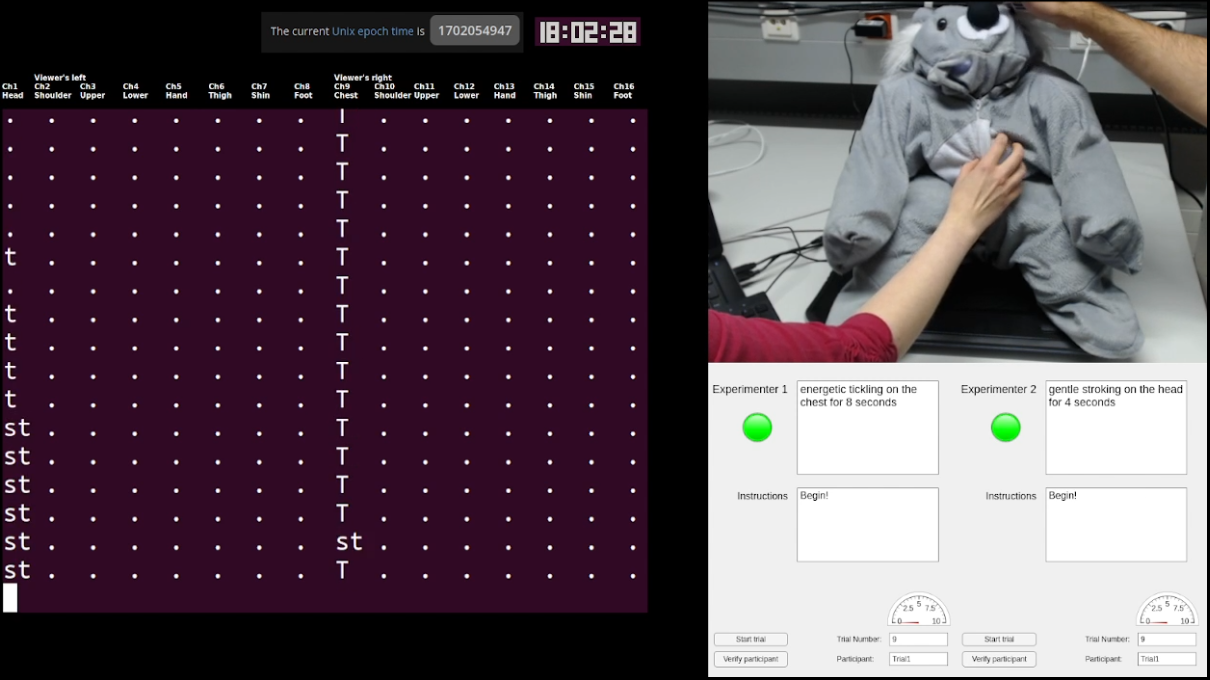
Social touch, such as a hug or a poke on the shoulder, is an essential aspect of everyday interaction. Humans use social touch to gain attention, communicate needs, express emotions, and build social bonds. Despite its importance, touch sensing is very limited in most commercially available robots. By endowing robots with social-touch perception, one can unlock a myriad of new interaction possibilities. In this thesis, I present my work on creating a Haptic Empathetic Robot Animal (HERA), a koala-like robot for children with autism. I demonstrate the importance of establishing design guidelines based on one's target audience, which we investigated through interviews with autism specialists. I share our work on creating full-body tactile sensing for the NAO robot using low-cost, do-it-yourself (DIY) methods, and I introduce an approach to model long-term robot emotions using second-order dynamics.
| Author(s): | Rachael Burns |
| Year: | 2024 |
| Month: | February |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Haptic Empathetic Robot Animal (HERA)
|
| Bibtex Type: | Ph.D. Thesis (phdthesis) |
| Paper Type: | Thesis |
| Address: | Tübingen, Germany |
| School: | University of Tübingen |
| Degree Type: | PhD |
| Note: | Department of Computer Science |
|
BibTex @phdthesis{Burns24-PHD-Robot,
title = {Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion},
author = {Burns, Rachael},
school = {University of Tübingen},
address = {Tübingen, Germany},
month = feb,
year = {2024},
note = {Department of Computer Science},
doi = {},
month_numeric = {2}
}
|
|