
The Haptic Intelligence Department at the Stuttgart site of the Max Planck Institute for Intelligent Systems in October of 2021. The screens held across the front row show seven team members who could not be physically present for the photograph.
When you touch objects in your surroundings, you can discern each item's physical properties from the rich array of haptic cues you experience, including both the tactile sensations arising in your skin and the kinesthetic cues originating in your muscles and joints. For example, picking up a glass of champagne refines your visual estimates of the glass's location, size, shape, and weight while also making you rapidly aware of the temperature, stiffness, smoothness, and friction of its surfaces. Feeling how these haptic sensations develop in response to your motions enables you to not only perceive the glass's material properties but also manipulate it fluidly, whether your goal is to hand it to a friend, bring it to your own lips to drink, place it upside-down in your dishwasher, or rotate it under a flow of hot water as your other hand scrubs it clean.
Over the course of life, humans leverage their rich sense of touch to master a wide variety of physical tasks, from everyday necessities like buttoning a jacket to difficult feats such as sculpting a marble statue or inserting a needle into a patient's vein. Many tasks are challenging when first tried, but practice usually enables one to improve the resulting interaction and optimize one's motions so they become almost automatic. You can gain some appreciation for the complexity of tasks that normally feel effortless, such as slicing bread or brushing your teeth, by trying to complete them with your non-dominant hand. Similarly, even the simplest manual skills become almost impossible if you lose your tactile sensitivity due to local anesthetic or a lack of blood flow. The crucial role of the sense of touch is also deeply appreciated by researchers working to create autonomous robots that can competently manipulate everyday objects and safely interact with humans in unstructured environments. Such systems rarely take advantage of haptic cues and thus often struggle to match the perception, manipulation, and interaction capabilities of humans.
Although humans experience this sense coherently, touch stems from a wide range of distributed mechanical, thermal, and pain receptors. Each type of mechanoreceptor responds most strongly to a different category of stimulation, with overlapping characteristic frequency ranges that go from steady state all the way up to 1000 Hz. Much about the sense of touch is understood, and many other aspects still need to be investigated. The most notable differences between touch and the more well-understood senses of vision and hearing are that exploring the world through touch requires action and that what one feels greatly depends on how one moves. It is also helpful to consider that vision has high spatial acuity and only moderate temporal acuity, while hearing is the opposite; different aspects of haptic perception lie along this spatiotemporal continuum between vision and hearing. Because we don't yet fully understand haptic interaction, few computer and machine interfaces provide the human operator with high-fidelity touch feedback or carefully analyze the physical signals generated during an interaction, limiting their usability.
The Haptic Intelligence Department of the Max Planck Institute for Intelligent Systems aims to elevate and formalize our understanding of haptic interaction while simultaneously inventing helpful human-computer, human-machine, and human-robot systems that take advantage of the unique capabilities of the sense of touch. We pursue this goal by undertaking research projects in the five main research fields of fingertip haptics, haptic interface technology, teleoperation interfaces, physical human-robot interaction, and touch sensing.
The specific projects we pursue take shape through a bottom-up process that draws on the experience and interests of the primary researcher, the expertise and creativity of our director and other HI department members, ideas from our collaborators both within and outside of MPI-IS, and recent discoveries in haptics and related areas. The resulting projects typically fit well within one of the above fields or bridge two of them, such as fingertip haptics + haptic interface technology or physical human-robot interaction + touch sensing; many projects are inspired by specific medical applications. Each project has a lead researcher who is a research scientist, postdoctoral fellow, doctoral student, or master's thesis student. This person will generally be the first author of resulting publications, and Dr. Kuchenbecker will generally be the last author. Depending on the demands of the project, this pair may be supported by one or more other researchers, visiting scientists, engineers, technicians, student research assistants, and/or interns. Our department has grown to a steady-state size of about 30 members, including about eight postdoctoral scientists, fifteen doctoral students, five engineers and technicians, and a steady flow of visiting scientists, interns, and student workers.
Members of the HI department enjoy working in our diverse international research environment. Our current team is gender balanced (eighteen women and seventeen men) and hails from eighteen countries around the world (Austria, Bulgaria, Canada, China, Colombia, France, Germany, India, Iran, Israel, Italy, Malaysia, the Netherlands, South Korea, Turkey, the USA, Uruguay, and Vietnam). Because we pursue highly interdisciplinary projects, we welcome applications from people in a wide range of fields. Many of our current department members have a background in mechanical engineering, biomedical engineering, electrical engineering, and/or computer science. Dr. Kuchenbecker uses an online system to let her team members book meetings on demand, aiming to meet with each person at least every two weeks. This time is spent discussing the recent progress, challenges, and future goals for each of the researcher's projects. When she travels or is otherwise occupied, she often assigns technical triplet meetings between researchers in lieu of these individual research meetings.
We hold department meeting for 90 minutes every other week, using Zoom to enable participation from home, Tübingen, Zürich, Pittsburgh, and many other locations. Other institute researchers, staff members, and future employees often join as guests. Our recurring agenda covers personnel changes, publication activities, awards and media attention, third-party funding, internal logistics, recent scientific talks, and upcoming events. Each attendee then spends one to two minutes giving an individual update on his or her recent activities, including accomplishments, goals, and a lesson (something they recently learned that others could benefit from). As a rotating task, a lab member writes down funny things that are said during each group meeting, and our director emails out an edited version of these quotes along with her typed minutes from the meeting.
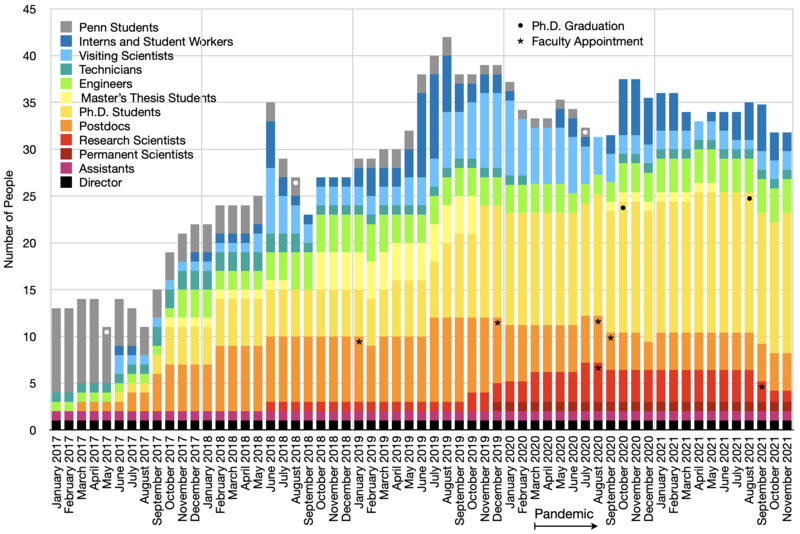
The development of the number of people in the Haptic Intelligence Department from our start in January of 2017 through November of 2021. The graduation dates of five doctoral students are highlighted with round markers, and stars mark the appointments of four of our postdoctoral researchers and two of our research scientists as independent scientists at academic research institutions.
Our primary publishing targets are full-length journal articles in a range of research fields and top-tier conference papers in fields related to computer science. We use hands-on demonstrations of our technology and peer-reviewed short papers (often works in progress, late-breaking reports, or workshop papers) as stepping stones to longer-format papers, beneficially gathering feedback from other researchers early in the process to increase the chances of high-impact contributions. To increase visibility for our activities and gain experience formally presenting research, our scientists frequently attend conferences in haptics, human-computer interaction, human-robot interaction, and robotics.
To help people prepare for conference presentations, thesis defenses, and job talks, the HI Department frequently holds presentation club. The presenter practices his or her talk, answers a large volume of questions similar to what they might expect in the target presentation venue, and then receives constructive suggestions from the group on how the presentation could be made more effective. In other weeks, presentation club includes reports from people who recently attended a conference, an interactive discussion of a particular paper, a brainstorming session for one of our research projects, or tips from lab members on tools helpful for research. Presentation club is coordinated by a lab member who serves at least six months in this position. Other key departmental leadership roles that rotate include Demo Coordinator, Human Subjects Coordinator, Internship Wizard, and Poster Coordinator. Working together in these ways helps us advance human understanding of touch cues and discover new opportunities for their use in interactions between humans, computers, and machines.

Fingertip Haptics
Human fingertips are marvelously sensitive to minute variations in surface properties and contact conditions, providing the soft medium that enables dexterous manipulation. Although we use them constantly, fingertips are not yet fully understood, nor are all the mechanisms that underpin haptic perce... Read More

Haptic Interface Technology
Haptic interfaces are mechatronic systems that modulate the physical interaction between a human and his or her tangible surroundings so that the human can act on and feel a virtual and/or remote environment. How can such systems vividly reproduce the perceptual experience of touching real objects and provide feedba... Read More
- Understanding the Perception of Electrovibration
- Dynamic Models and Wearable Tactile Devices for the Fingertips
- Exploring and Benchmarking Grounded Force-Feedback Devices
- Halbach-Ring Motor Design
- Gait Rehabilitation Through Haptic Feedback
- Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures

Teleoperation Interfaces
Commonly used in minimally invasive robotic surgery and hazardous material handling, telerobotic systems empower humans to manipulate items by remotely controlling a robot. The user sends commands and receives multimodal feedback via the teleoperation interface, which is where we focus our attention. How can su... Read More

Physical Human-Robot Interaction
While autonomous robots excel at repetitive tasks in controlled environments, the world in which most humans live is messy, constantly changing, and filled with other people. Important opportunities exist for helping humans in these unstructured environments, particularly as our population ages, but new approaches a... Read More

Touch Sensing
Humans and animals possess sophisticated skin that not only protects the body but is also exquisitely sensitive to physical contact. In contrast, most robots have no tactile sensing, since commercial touch sensors tend to be expensive, difficult to integrate into real robots, and rather limited in size, robustn... Read More

Previous Projects
These projects have been completed and are thus no longer being actively pursued by researchers in the Haptic Intelligence Department of the Max Planck Institute for Intelligent Systems. Read More
- Perceptual Integration of Contact Force Components During Tactile Stimulation
- Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
- Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
- Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
- Learning Upper-Limb Exercises from Demonstrations
- Efficient Large-Area Tactile Sensing for Robot Skin
- Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
- Computational Modeling of Finger-Surface Contact
- Modeling Hand Deformations During Contact
- Immersive VR for Phantom Limb Pain
- Visual and Haptic Perception of Real Surfaces
- Haptipedia
- Gait Propulsion Trainer
- TouchTable: A Musical Interface with Haptic Feedback for DJs
- How Should Robots Hug?
- Hierarchical Structure for Learning from Demonstration
- Fabrication of HuggieBot 2.0: A More Huggable Robot
- Learning Haptic Adjectives from Tactile Data
- Feeling With Your Eyes: Visual-Haptic Surface Interaction
- S-BAN
- General Tactile Sensor Model