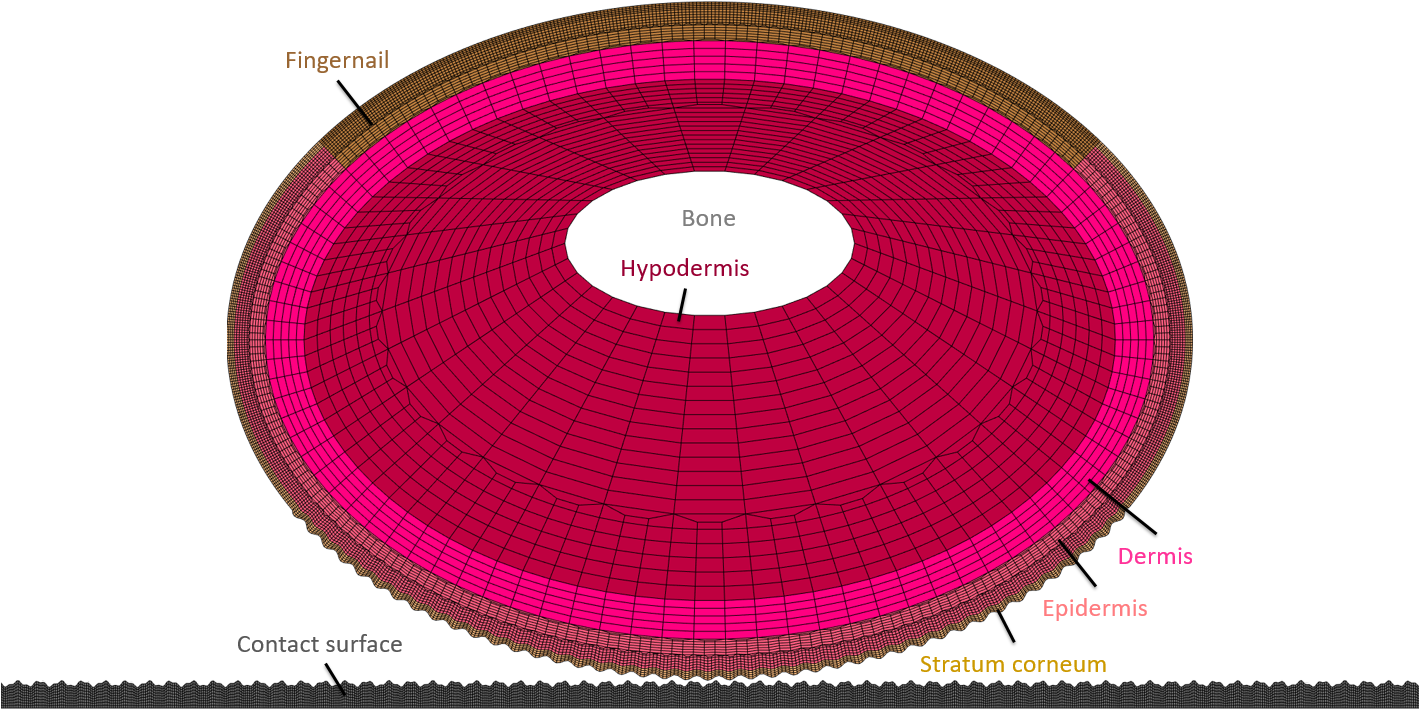
2D finite element model of the fingertip cross section, which is composed of multiple tissue layers, and a rough contact surface.
Development of surface haptic technologies has lately drawn significant attention, in parallel with the growing use of modern electronic devices involving touchscreens. Different haptic scenarios provide active tactile feedback by controlling natural physical phenomena such as contact, friction, and vibrations. However, these systems are often too complex to model using analytical means because they involve multiple physics domains. Moreover, the stresses within the real finger and the contact surface, as well as the resulting deformation fields, are irregular. Most analytical models are insufficient for such situations because they assume a smooth and continuous distribution of variables. Therefore, advanced numerical simulations are required to fully understand the physical interactions that occur at finger-surface interfaces.
This project focuses on computational modeling of contact mechanics between the finger and passive surfaces mechanically vibrating surfaces, and surfaces that are providing haptic feedback via electrovibration. We aim to develop simulation tools that will enable both deeper understanding of contact phenomena in surface haptics applications and circumvention of a portion of costly experimental procedures. Such tools can be used for the optimal design of intelligent systems delivering various realistic haptic experiences on today’s electronic devices such as smartphones or tablet computers.