Publication Type
- Article (148)
- Book Chapter
- Conference Paper (159)
- Issue
- MPI Year Book (2)
- Master Thesis
- Miscellaneous (169)
- Patent
- Ph.D. Thesis
2024

Engineering and Evaluating Naturalistic Vibrotactile Feedback for Telerobotic Assembly
2024
Gong, Y.
Engineering and Evaluating Naturalistic Vibrotactile Feedback for Telerobotic Assembly
University of Stuttgart, Stuttgart, Germany, August 2024, Faculty of Design, Production Engineering and Automotive Engineering (phdthesis)
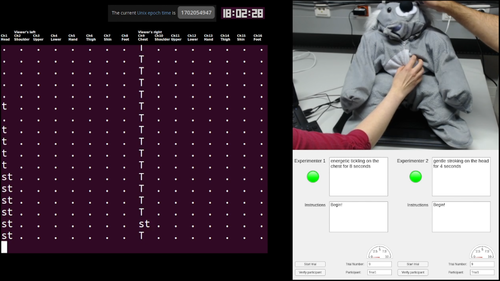
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
Burns, R.
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
University of Tübingen, Tübingen, Germany, February 2024, Department of Computer Science (phdthesis)
2023
Gesture-Based Nonverbal Interaction for Exercise Robots
2023
Mohan, M.
Gesture-Based Nonverbal Interaction for Exercise Robots
University of Tübingen, Tübingen, Germany, October 2023, Department of Computer Science (phdthesis)
2022
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
2022
Richardson, B.
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
University of Stuttgart, Stuttgart, Germany, December 2022, Faculty of Computer Science, Electrical Engineering and Information Technology (phdthesis)
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
Nam, S.
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
University of Tübingen, Tübingen, Germany, October 2022, Department of Computer Science (phdthesis)
2021
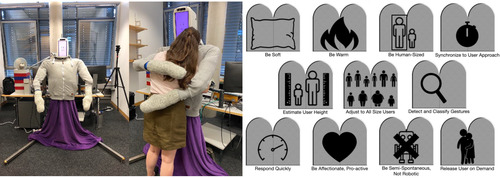
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
2021
Block, A. E.
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
ETH Zürich, Zürich, August 2021, Department of Computer Science (phdthesis)
Robotic Surgery Training in AR: Multimodal Record and Replay
Krauthausen, F.
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
An electric machine with two-phase planar Lorentz coils and a ring-shaped Halbach array for high torque density and high-precision applications
Nguyen, V., Javot, B., Kuchenbecker, K. J.
(EP21170679.1), April 2021 (patent)
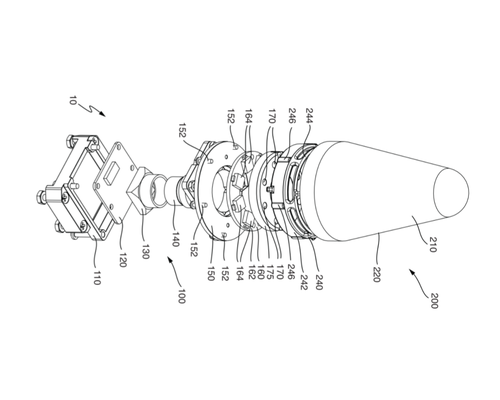
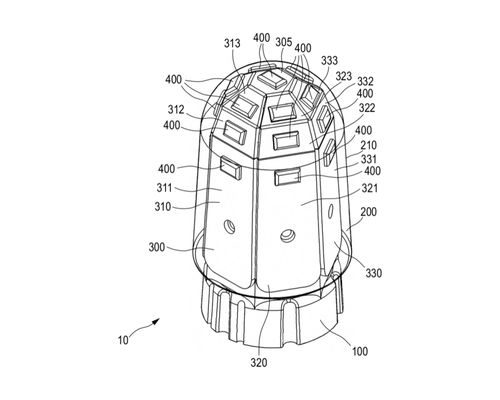
Sensor arrangement for sensing forces and methods for fabricating a sensor arrangement and parts thereof
Sun, H., Martius, G., Kuchenbecker, K. J.
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
Sun, H., Martius, G., Kuchenbecker, K. J.
Sensor arrangement for sensing forces and methods for fabricating a sensor arrangement and parts thereof
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
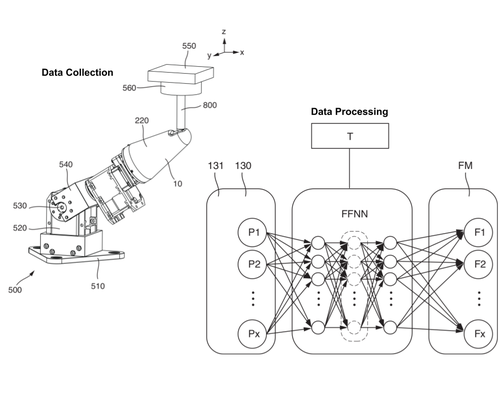
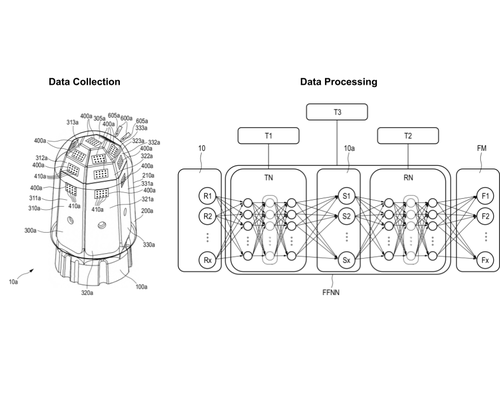
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
Sun, H., Martius, G., Kuchenbecker, K. J.
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
Sun, H., Martius, G., Kuchenbecker, K. J.
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
2020
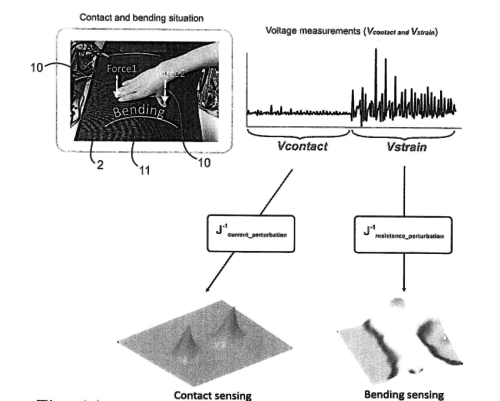
System and method for simultaneously sensing contact force and lateral strain
2020
Lee, H., Kuchenbecker, K. J.
System and method for simultaneously sensing contact force and lateral strain
(EP20000480.2), December 2020 (patent)
Delivering Expressive and Personalized Fingertip Tactile Cues
Young, E. M.
Delivering Expressive and Personalized Fingertip Tactile Cues
University of Pennsylvania, Philadelphia, PA, December 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
(PCT/EP2020/083260), November 2020 (patent)
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
(PCT/EP2020/083260), November 2020 (patent)
Modulating Physical Interactions in Human-Assistive Technologies
Hu, S.
Modulating Physical Interactions in Human-Assistive Technologies
University of Pennsylvania, Philadelphia, PA, August 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
2019
Haptic Reality: Novel Interfacing for Informed Assembly Systems
Tashiro, N., Faulkner, R., Melnyk, S., Rosales, T.
University of Stuttgart, 2019 (mastersthesis)
2019
Tashiro, N., Faulkner, R., Melnyk, S., Rosales, T.
Haptic Reality: Novel Interfacing for Informed Assembly Systems
University of Stuttgart, 2019 (mastersthesis)
2018
Instrumentation, Data, and Algorithms for Visually Understanding Haptic Surface Properties
2018
Burka, A. L.
Instrumentation, Data, and Algorithms for Visually Understanding Haptic Surface Properties
University of Pennsylvania, Philadelphia, USA, August 2018, Department of Electrical and Systems Engineering (phdthesis)
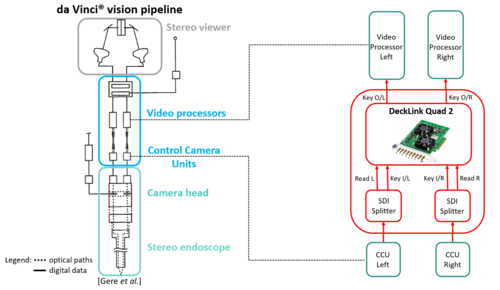
Robust Visual Augmented Reality in Robot-Assisted Surgery
Forte, M.
Robust Visual Augmented Reality in Robot-Assisted Surgery
Politecnico di Milano, Milan, Italy, July 2018, Department of Electronic, Information, and Biomedical Engineering (mastersthesis)
Haptics and Haptic Interfaces
Kuchenbecker, K. J.
Haptics and Haptic Interfaces
In Encyclopedia of Robotics, (Editors: Marcelo H. Ang and Oussama Khatib and Bruno Siciliano), Springer, May 2018 (incollection)
2017
Design and Evaluation of Interactive Hand-Clapping Robots
Naomi T. Fitter
University of Pennsylvania, August 2017, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
2017
Naomi T. Fitter
Design and Evaluation of Interactive Hand-Clapping Robots
University of Pennsylvania, August 2017, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
How Should Robots Hug?
Block, A. E.
How Should Robots Hug?
University of Pennsylvania, May 2017, Robotics Degree Program (mastersthesis)