
2024
Matthew, V., Simancek, R. E., Telepo, E., Machesky, J., Willman, H., Ismail, A. B., Schulz, A. K.
Empowering Change: The Role of Student Changemakers in Advancing Sustainability within Engineering Education
Proceedings of the American Society of Engineering Education (ASEE), June 2024, Victoria Matthew and Andrew K. Schulz contributed equally to this publication. (issue) In press
Burns, R.
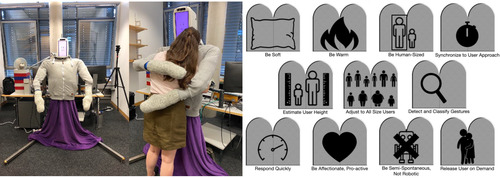
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
University of Tübingen, Tübingen, Germany, February 2024, Department of Computer Science (phdthesis)
2023
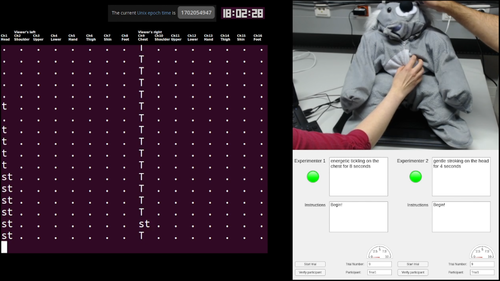
Mohan, M.
Gesture-Based Nonverbal Interaction for Exercise Robots
University of Tübingen, Tübingen, Germany, October 2023, Department of Computer Science (phdthesis)
2022
Richardson, B.
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
University of Stuttgart, Stuttgart, Germany, December 2022, Faculty of Computer Science, Electrical Engineering and Information Technology (phdthesis)
Nam, S.
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
University of Tübingen, Tübingen, Germany, October 2022, Department of Computer Science (phdthesis)
2021
Block, A. E.
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
ETH Zürich, Zürich, August 2021, Department of Computer Science (phdthesis)
Krauthausen, F.
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
Sun, H., Martius, G., Kuchenbecker, K. J.
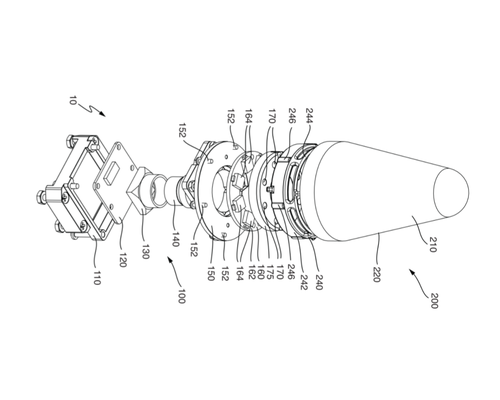
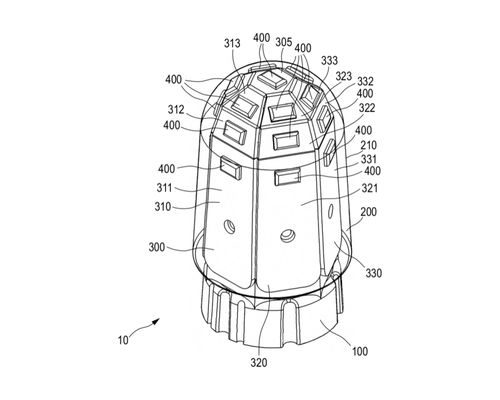
Sensor arrangement for sensing forces and methods for fabricating a sensor arrangement and parts thereof
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
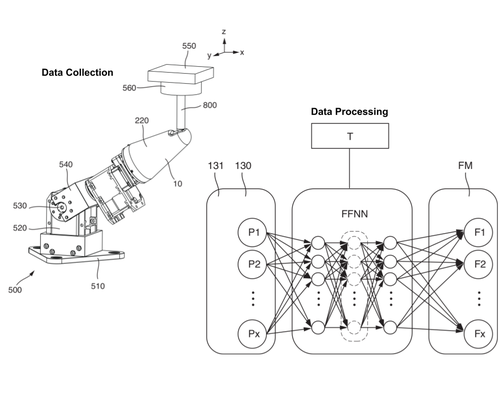
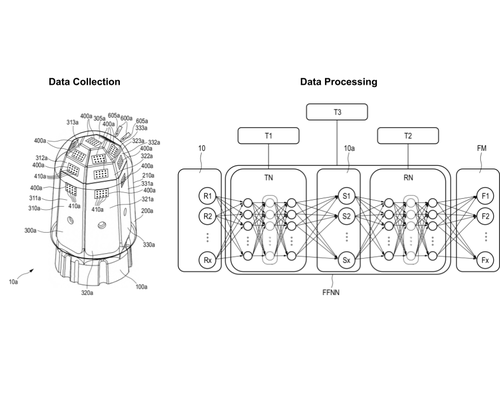
Sun, H., Martius, G., Kuchenbecker, K. J.
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
2020
Young, E. M.
Delivering Expressive and Personalized Fingertip Tactile Cues
University of Pennsylvania, Philadelphia, PA, December 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
Lee, H., Kuchenbecker, K. J.
System and method for simultaneously sensing contact force and lateral strain
(EP20000480.2), December 2020 (patent)
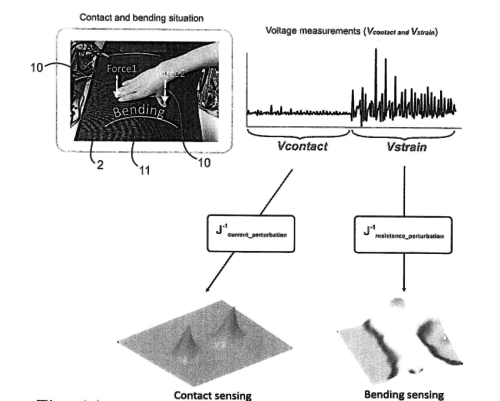
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
(PCT/EP2020/083260), November 2020 (patent)
Hu, S.
Modulating Physical Interactions in Human-Assistive Technologies
University of Pennsylvania, Philadelphia, PA, August 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)

2019
Scientific Report 2016 - 2018
2019 (mpi_year_book)
Tashiro, N., Faulkner, R., Melnyk, S., Rosales, T.
Haptic Reality: Novel Interfacing for Informed Assembly Systems
University of Stuttgart, 2019 (mastersthesis)
2018
Serhat, G.
Multi-objective Optimization of Nonconventional Laminated Composite Panels
Koc University, October 2018 (phdthesis)
Burka, A. L.
Instrumentation, Data, and Algorithms for Visually Understanding Haptic Surface Properties
University of Pennsylvania, Philadelphia, USA, August 2018, Department of Electrical and Systems Engineering (phdthesis)
Forte, M.
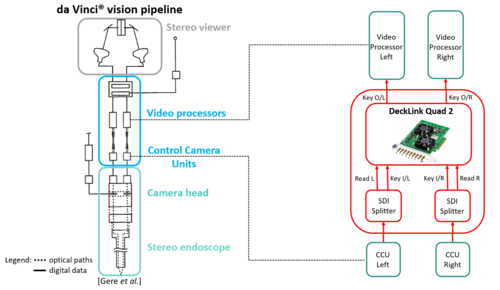
Robust Visual Augmented Reality in Robot-Assisted Surgery
Politecnico di Milano, Milan, Italy, July 2018, Department of Electronic, Information, and Biomedical Engineering (mastersthesis)
Vardar, Y.
Tactile perception by electrovibration
Koc University, 2018 (phdthesis)
2017
Burns, R.
Robotic Motion Learning Framework to Promote Social Engagement
The George Washington University, August 2017 (mastersthesis)
Naomi T. Fitter
Design and Evaluation of Interactive Hand-Clapping Robots
University of Pennsylvania, August 2017, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
Block, A. E.
How Should Robots Hug?
University of Pennsylvania, May 2017, Robotics Degree Program (mastersthesis)
2013
Serhat, G.
Determination of an Analysis Procedure for FEM-Based Fatigue Calculations
Technical University of Munich, December 2013 (mastersthesis)
2012
Vardar, Y.
Estimation of MIMO Closed-Loop Poles using Transfer Function Data
Eindhoven University of Technology, the Netherlands, 2012 (mastersthesis)
2006
Kuchenbecker, K. J.
Characterizing and Controlling the High-Frequency Dynamics of Haptic Interfaces
Stanford University, June 2006 (phdthesis)

Scientific Report 2016 - 2021
(mpi_year_book)