
2021
Krauthausen, F.
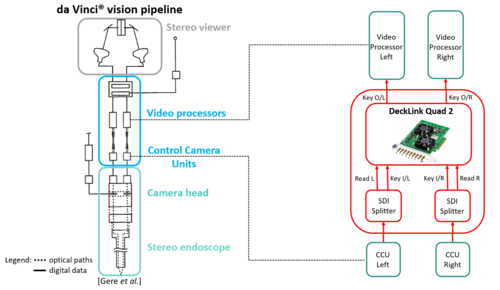
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
Sun, H., Martius, G., Kuchenbecker, K. J.
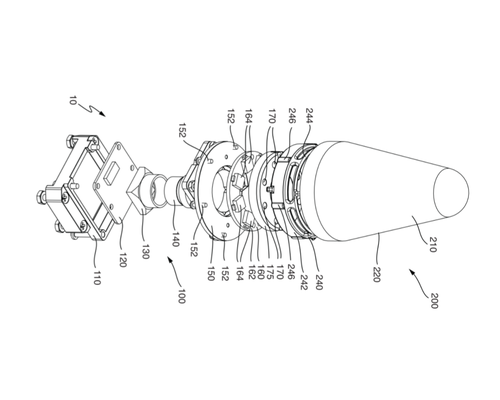
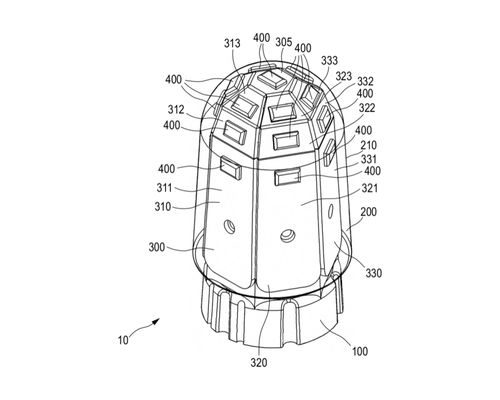
Sensor Arrangement for Sensing Forces and Methods for Fabricating a Sensor Arrangement and Parts Thereof
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
Sun, H., Martius, G., Kuchenbecker, K. J.
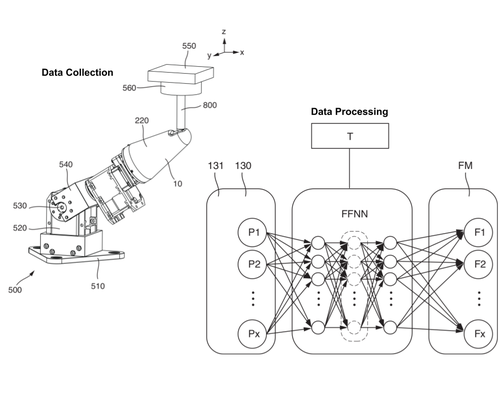
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
2020
Lee, H., Kuchenbecker, K. J.
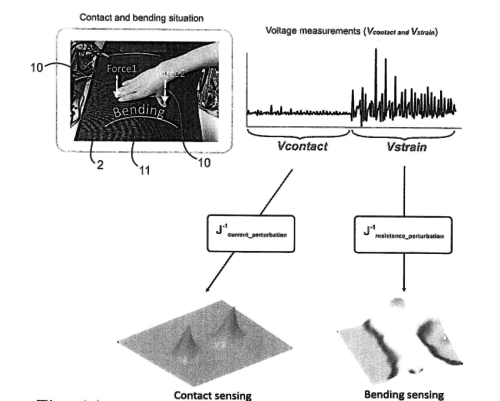
System and Method for Simultaneously Sensing Contact Force and Lateral Strain
(EP20000480.2), December 2020 (patent)
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
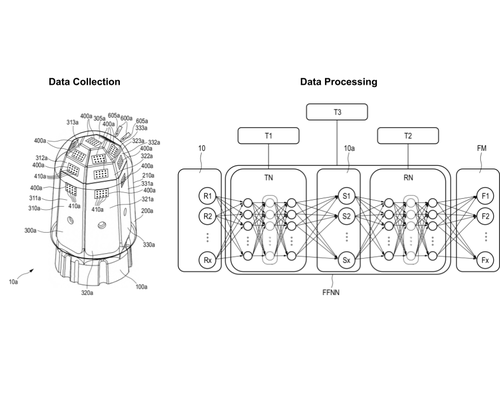
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
(PCT/EP2020/083260), November 2020 (patent)
2019
Tashiro, N., Faulkner, R., Melnyk, S., Rosales, T.
Haptic Reality: Novel Interfacing for Informed Assembly Systems
University of Stuttgart, 2019 (mastersthesis)
2018
Forte, M.
Robust Visual Augmented Reality in Robot-Assisted Surgery
Politecnico di Milano, Milan, Italy, July 2018, Department of Electronic, Information, and Biomedical Engineering (mastersthesis)
Kuchenbecker, K. J.
Haptics and Haptic Interfaces
In Encyclopedia of Robotics, (Editors: Marcelo H. Ang and Oussama Khatib and Bruno Siciliano), Springer, May 2018 (incollection)
2017
Burns, R.
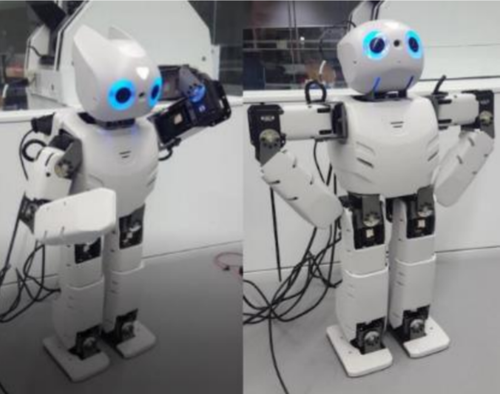
Robotic Motion Learning Framework to Promote Social Engagement
The George Washington University, August 2017 (mastersthesis)
Block, A. E.
How Should Robots Hug?
University of Pennsylvania, May 2017, Robotics Degree Program (mastersthesis)
2013
Serhat, G.
Determination of an Analysis Procedure for FEM-Based Fatigue Calculations
Technical University of Munich, December 2013 (mastersthesis)
2012
Vardar, Y.
Estimation of MIMO Closed-Loop Poles using Transfer Function Data
Eindhoven University of Technology, the Netherlands, 2012 (mastersthesis)
2008
Okamura, A. M., Kuchenbecker, K. J., Mahvash, M.
Measurement-Based Modeling for Haptic Rendering
In Haptic Rendering: Algorithms and Applications, pages: 443-467, 21, A. K. Peters, May 2008 (incollection)