Robust Visual Augmented Reality in Robot-Assisted Surgery
2018
Master Thesis
hi
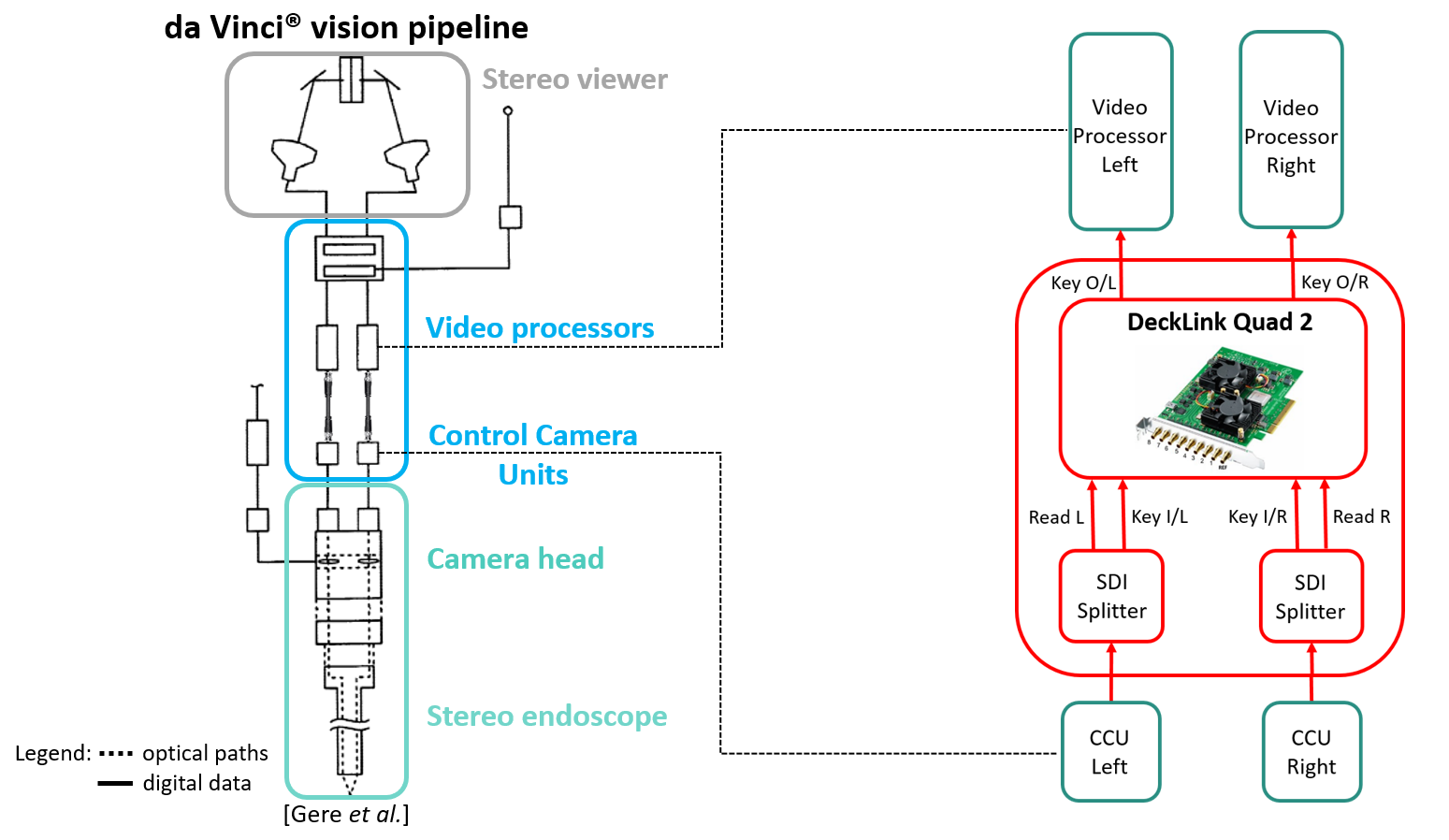
The broader research objective of this line of research is to test the hypothesis that real-time stereo video analysis and augmented reality can increase safety and task efficiency in robot-assisted surgery. This master’s thesis aims to solve the first step needed to achieve this goal: the creation of a robust system that delivers the envisioned feedback to a surgeon while he or she controls a surgical robot that is identical to those used on human patients. Several approaches for applying augmented reality to da Vinci Surgical Systems have been proposed, but none of them entirely rely on a clinical robot; specifically, they require additional sensors, depend on access to the da Vinci API, are designed for a very specific task, or were tested on systems that are starkly different from those in clinical use. There has also been prior work that presents the real-world camera view and the computer graphics on separate screens, or not in real time. In other scenarios, the digital information is overlaid manually by the surgeons themselves or by computer scientists, rather than being generated automatically in response to the surgeon’s actions. We attempted to overcome the aforementioned constraints by acquiring input signals from the da Vinci stereo endoscope and providing augmented reality to the console in real time (less than 150 ms delay, including the 62 ms of inherent latency of the da Vinci). The potential benefits of the resulting system are broad because it was built to be general, rather than customized for any specific task. The entire platform is compatible with any generation of the da Vinci System and does not require a dVRK (da Vinci Research Kit) or access to the API. Thus, it can be applied to existing da Vinci Systems in operating rooms around the world.
| Author(s): | Maria-Paola Forte |
| Year: | 2018 |
| Month: | July |
| Department(s): | Haptic Intelligence |
| Research Project(s): | |
| Bibtex Type: | Master Thesis (mastersthesis) |
| Address: | Milan, Italy |
| School: | Politecnico di Milano |
| Note: | Department of Electronic, Information, and Biomedical Engineering |
|
BibTex @mastersthesis{Forte18-M-Augmented,
title = {Robust Visual Augmented Reality in Robot-Assisted Surgery},
author = {Forte, Maria-Paola},
school = {Politecnico di Milano},
address = {Milan, Italy},
month = jul,
year = {2018},
note = {Department of Electronic, Information, and Biomedical Engineering},
doi = {},
month_numeric = {7}
}
|
|