
2021
Sun, H., Martius, G., Kuchenbecker, K. J.
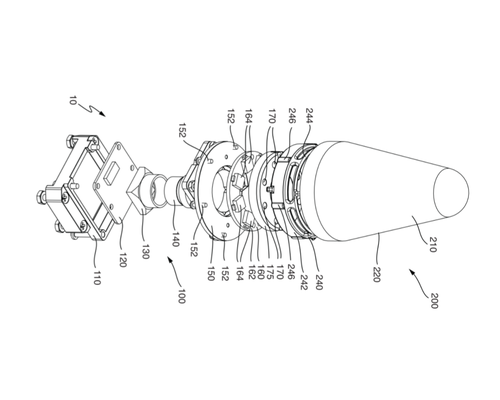
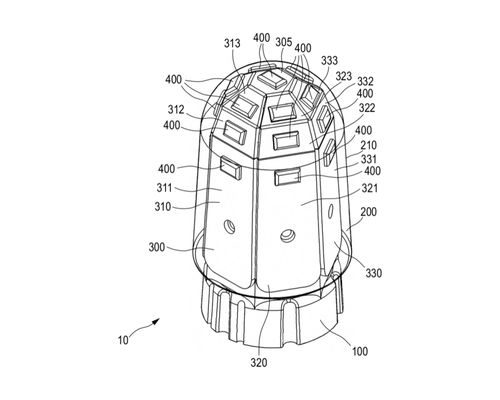
Sensor arrangement for sensing forces and methods for fabricating a sensor arrangement and parts thereof
(PCT/EP2021/050230), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
Sun, H., Martius, G., Kuchenbecker, K. J.
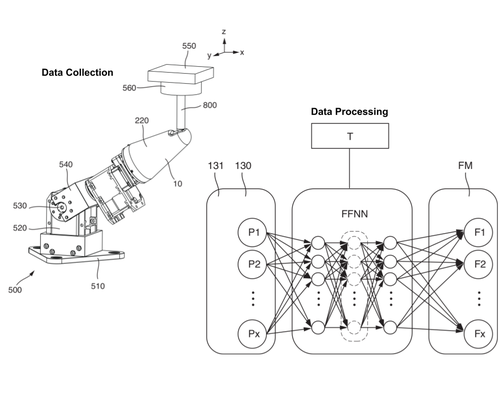
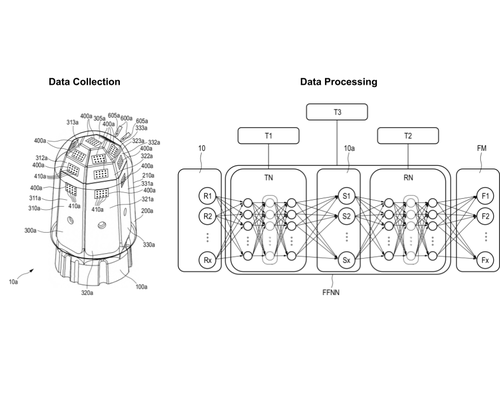
Method for force inference, method for training a feed-forward neural network, force inference module, and sensor arrangement
(PCT/EP2021/050231), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, January 2021 (patent)
2020
Lee, H., Kuchenbecker, K. J.
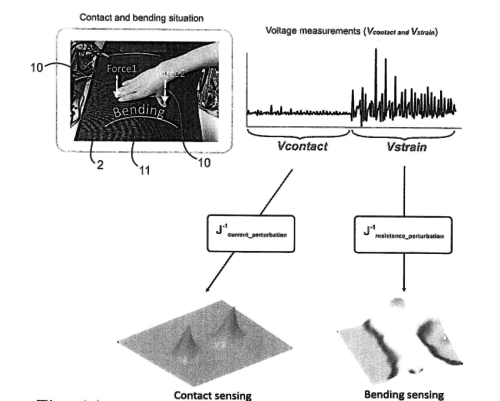
System and method for simultaneously sensing contact force and lateral strain
(EP20000480.2), December 2020 (patent)
Sun, H., Martius, G., Lee, H., Spiers, A., Fiene, J.
Method for Force Inference of a Sensor Arrangement, Methods for Training Networks, Force Inference Module and Sensor Arrangement
(PCT/EP2020/083261), Max Planck Institute for Intelligent Systems, Max Planck Ring 4, November 2020 (patent)
Spiers, A., Sun, H., Lee, H., Martius, G., Fiene, J., Seo, W. H.
Sensor Arrangement for Sensing Forces and Method for Farbricating a Sensor Arrangement
(PCT/EP2020/083260), November 2020 (patent)

2019
Scientific Report 2016 - 2018
2019 (mpi_year_book)

Scientific Report 2016 - 2021
(mpi_year_book)