
2021
Krauthausen, F.
Robotic Surgery Training in AR: Multimodal Record and Replay
pages: 1-147, University of Stuttgart, Stuttgart, May 2021, Study Program in Software Engineering (mastersthesis)
2019
Tashiro, N., Faulkner, R., Melnyk, S., Rosales, T.
Haptic Reality: Novel Interfacing for Informed Assembly Systems
University of Stuttgart, 2019 (mastersthesis)
2018
Forte, M.
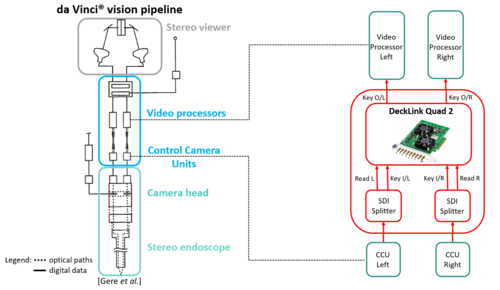
Robust Visual Augmented Reality in Robot-Assisted Surgery
Politecnico di Milano, Milan, Italy, July 2018, Department of Electronic, Information, and Biomedical Engineering (mastersthesis)
2017
Block, A. E.
How Should Robots Hug?
University of Pennsylvania, May 2017, Robotics Degree Program (mastersthesis)