Characterization of a Magnetic Levitation Haptic Interface for Realistic Tool-Based Interactions
2020
Miscellaneous
hi
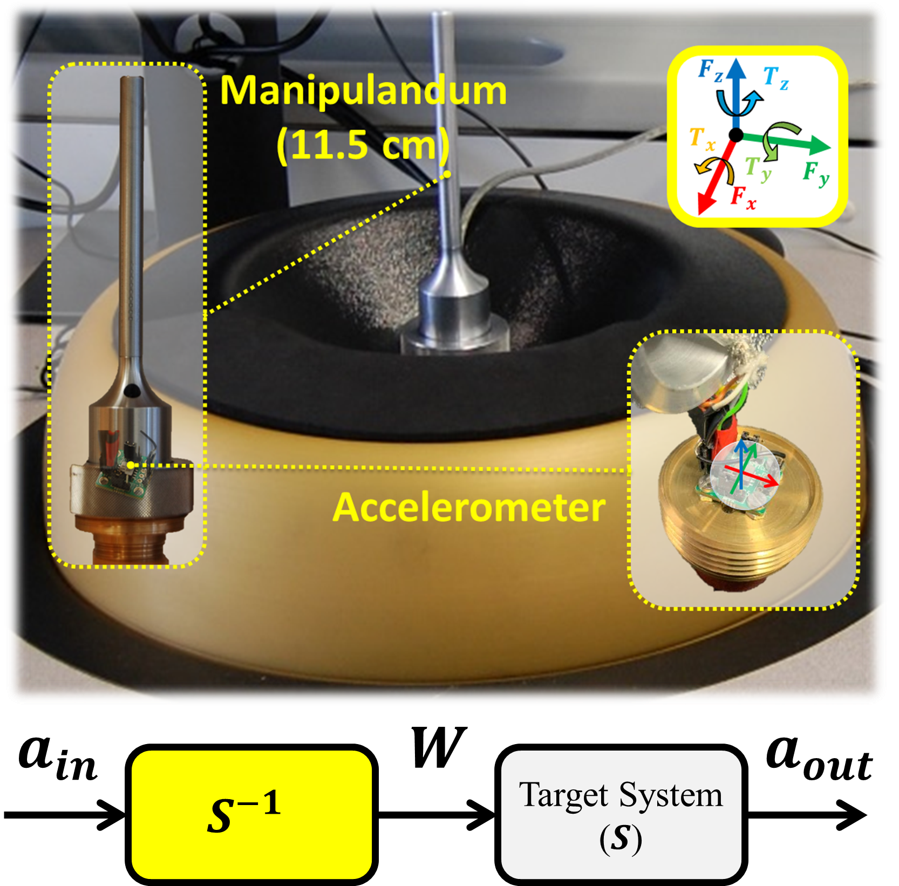
We introduce our recent study on the characterization of a commercial magnetic levitation haptic interface (MagLev 200, Butterfly Haptics LLC) for realistic high-bandwidth interactions. This device’s haptic rendering scheme can provide strong 6-DoF (force and torque) feedback without friction at all poses in its small workspace. The objective of our study is to enable the device to accurately render realistic multidimensional vibrotactile stimuli measured from a stylus-like tool. Our approach is to characterize the dynamics between the commanded wrench and the resulting translational acceleration across the frequency range of interest. To this end, we first custom-designed and attached a pen-shaped manipulandum (11.5 cm, aluminum) to the top of the MagLev 200’s end-effector for better usability in grasping. An accelerometer (ADXL354, Analog Devices) was rigidly mounted inside the manipulandum. Then, we collected a data set where the input is a 30-second-long force and/or torque signal commanded as a sweep function from 10 to 500 Hz; the output is the corresponding acceleration measurement, which we collected both with and without a user holding the handle. We succeeded at fitting both non-parametric and parametric versions of the transfer functions for both scenarios, with a fitting accuracy of about 95% for the parametric transfer functions. In the future, we plan to find the best method of applying the inverse parametric transfer function to our system. We will then employ that compensation method in a user study to evaluate the realism of different algorithms for reducing the dimensionality of tool-based vibrotactile cues.
| Author(s): | Hojin Lee and Güney Işık Tombak and Gunhyuk Park and Katherine J. Kuchenbecker |
| Year: | 2020 |
| Month: | September |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
|
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Work in Progress |
| Address: | Leiden, The Netherlands |
| How Published: | Work-in-progress poster presented at EuroHaptics |
| State: | Published |
| URL: | http://eurohaptics2020.org/program/posters-demos-1/ |
|
BibTex @misc{Lee20-EHWIP-Characterization,
title = {Characterization of a Magnetic Levitation Haptic Interface for Realistic Tool-Based Interactions},
author = {Lee, Hojin and Tombak, G\"{u}ney I{\c{s}}{\i}k and Park, Gunhyuk and Kuchenbecker, Katherine J.},
howpublished = {Work-in-progress poster presented at EuroHaptics},
address = {Leiden, The Netherlands},
month = sep,
year = {2020},
doi = {},
url = {http://eurohaptics2020.org/program/posters-demos-1/},
month_numeric = {9}
}
|
|