Surface Perception through Haptic-Auditory Contact Data
2023
Miscellaneous
hi
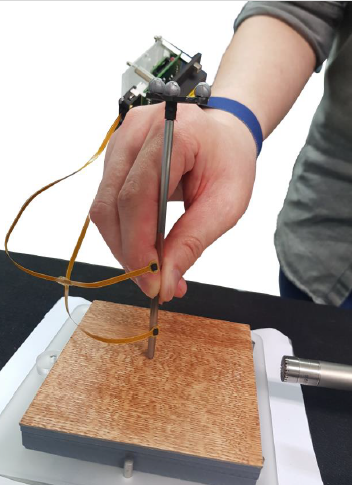
Sliding a finger or tool along a surface generates rich haptic and auditory contact signals that encode properties crucial for manipulation, such as friction and hardness. To engage in contact-rich manipulation, future robots would benefit from having surface-characterization capabilities similar to humans, but the optimal sensing configuration is not yet known. Thus, we developed a test bed for capturing high-quality measurements as a human touches surfaces with different tools: it includes optical motion capture, a force/torque sensor under the surface sample, high-bandwidth accelerometers on the tool and the fingertip, and a high-fidelity microphone. After recording data from three tool diameters and nine surfaces, we describe a surface-classification pipeline that uses the maximum mean discrepancy (MMD) to compare newly gathered data to each surface in our known library. The results achieved under several pipeline variations are compared, and future investigations are outlined.
| Author(s): | Behnam Khojasteh and Yitian Shao and Katherine J. Kuchenbecker |
| Year: | 2023 |
| Month: | May |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Surface Interactions as Probability Distributions in Embedding Spaces
|
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Workshop |
| Address: | London, UK |
| How Published: | Workshop paper (4 pages) presented at the ICRA Workshop on Embracing Contacts |
| State: | Published |
| URL: | https://openreview.net/forum?id=aNFtngbn6A |
|
BibTex @misc{Khojasteh23-ICRAWS-Perception,
title = {Surface Perception through Haptic-Auditory Contact Data},
author = {Khojasteh, Behnam and Shao, Yitian and Kuchenbecker, Katherine J.},
howpublished = {Workshop paper (4 pages) presented at the ICRA Workshop on Embracing Contacts},
address = {London, UK},
month = may,
year = {2023},
doi = {},
url = {https://openreview.net/forum?id=aNFtngbn6A},
month_numeric = {5}
}
|
|