OCRA: An Optimization-Based Customizable Retargeting Algorithm for Teleoperation
2023
Miscellaneous
hi
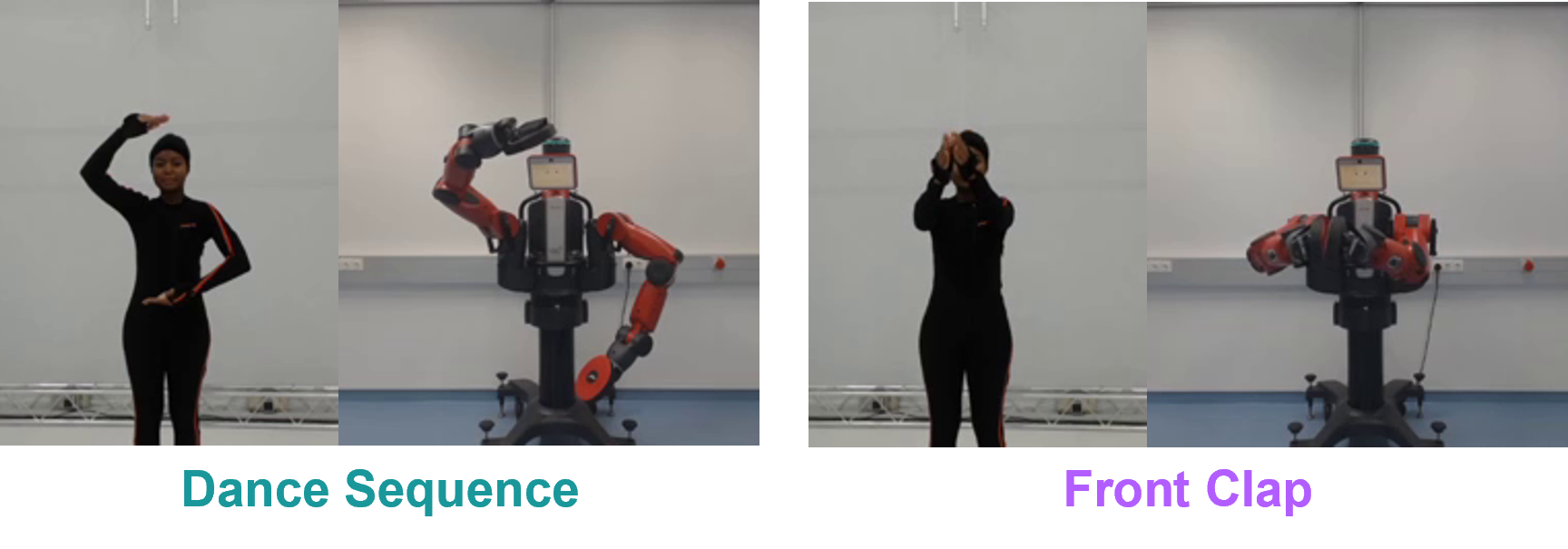
This paper presents a real-time optimization-based algorithm for mapping motion between two kinematically dissimilar serial linkages, such as a human arm and a robot arm. OCRA can be customized based on the target task to weight end-effector orientation versus the configuration of the central line of the arm, which we call the skeleton. A video-watching study (N=70) demonstrated that when this algorithm considers both the hand orientation and the arm skeleton, it creates robot arm motions that users perceive to be highly similar to those of the human operator, indicating OCRA would be suitable for telerobotics and telepresence through avatars.
| Author(s): | Mayumi Mohan and Katherine J. Kuchenbecker |
| Year: | 2023 |
| Month: | May |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Teleoperating Max's Head and Arms
|
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Workshop |
| Address: | London, UK |
| How Published: | Workshop paper (3 pages) presented at the ICRA Workshop Toward Robot Avatars |
| State: | Published |
| URL: | https://www.ais.uni-bonn.de/ICRA2023AvatarWS/contributions/ICRA_2023_Avatar_WS_Mohan.pdf |
|
BibTex @misc{Mohan23-ICRAWS-OCRA,
title = {{OCRA}: An Optimization-Based Customizable Retargeting Algorithm for Teleoperation},
author = {Mohan, Mayumi and Kuchenbecker, Katherine J.},
howpublished = {Workshop paper (3 pages) presented at the ICRA Workshop Toward Robot Avatars},
address = {London, UK},
month = may,
year = {2023},
doi = {},
url = {https://www.ais.uni-bonn.de/ICRA2023AvatarWS/contributions/ICRA_2023_Avatar_WS_Mohan.pdf},
month_numeric = {5}
}
|
|