Towards Seamless Handovers with Legged Manipulators (Talk)
- Andreea Tulbure (Ph.D. Candidate)
- ETH Zurich
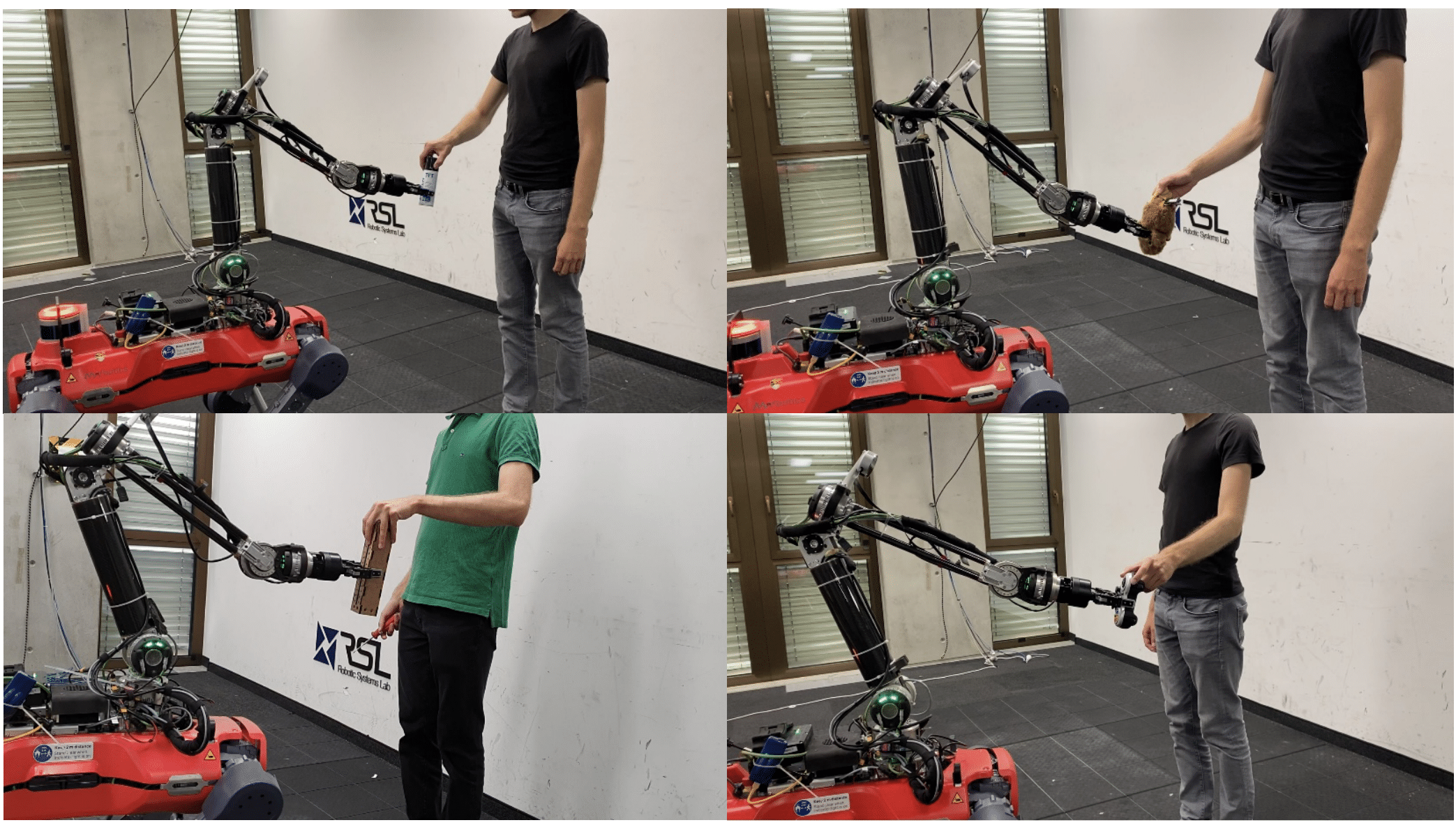
Deploying perception and control modules for handovers is challenging because they require a high degree of robustness and generalizability to work reliably for a diversity of objects and situations, but also adaptivity to adjust to individual preferences. On legged robots, deployment is particularly challenging because of the limited computational resources and the additional sensing noise resulting from locomotion. In this talk, I will discuss how we tackle some of these challenges, by first introducing our perception framework and discussing the insights of the first human-robot handover user study with legged manipulators. Furthermore, I will show how we combine imitation and reinforcement learning to achieve some degree of adaptivity during handovers. Finally, I will present our work in which the robot takes into account the post-handover task of the collaboration partner when handing over an object. This is beneficial for situations where the human range of motion is constrained during the handover or time is crucial.
Biography: Andreea Tulbure is a Ph.D. Candidate in Robotics at ETH Zurich, Zurich, Switzerland. Andreea works in the Robotics Systems Lab (RSL) Lab under the supervision of Prof. Dr. Marco Hutter. Her work on physical human-robot interaction focuses on developing robust perception and adaptive control frameworks for handover and collaborative load-carrying tasks with legged manipulators using only on-board sensing and computing. Her vision is to enable such robots to safely interact with humans in search and rescue scenarios or on construction sites. Before ETH Zurich, Andreea worked in various robotics research groups at Stanford University, Karlsruhe Institute of Technology (KIT), and the German Aerospace Center (DLR). She received her M.Sc. in Computer Science from Karlsruhe Institute of Technology (KIT).
Details
- 10 October 2023 • 14:00 - 15:00
- Hybrid - Webex plus in-person attendance in 5N18
- Haptic Intelligence
