Towards a Statistical Model of Fingertip Contact Deformations from 4D Data
2018
Miscellaneous
hi
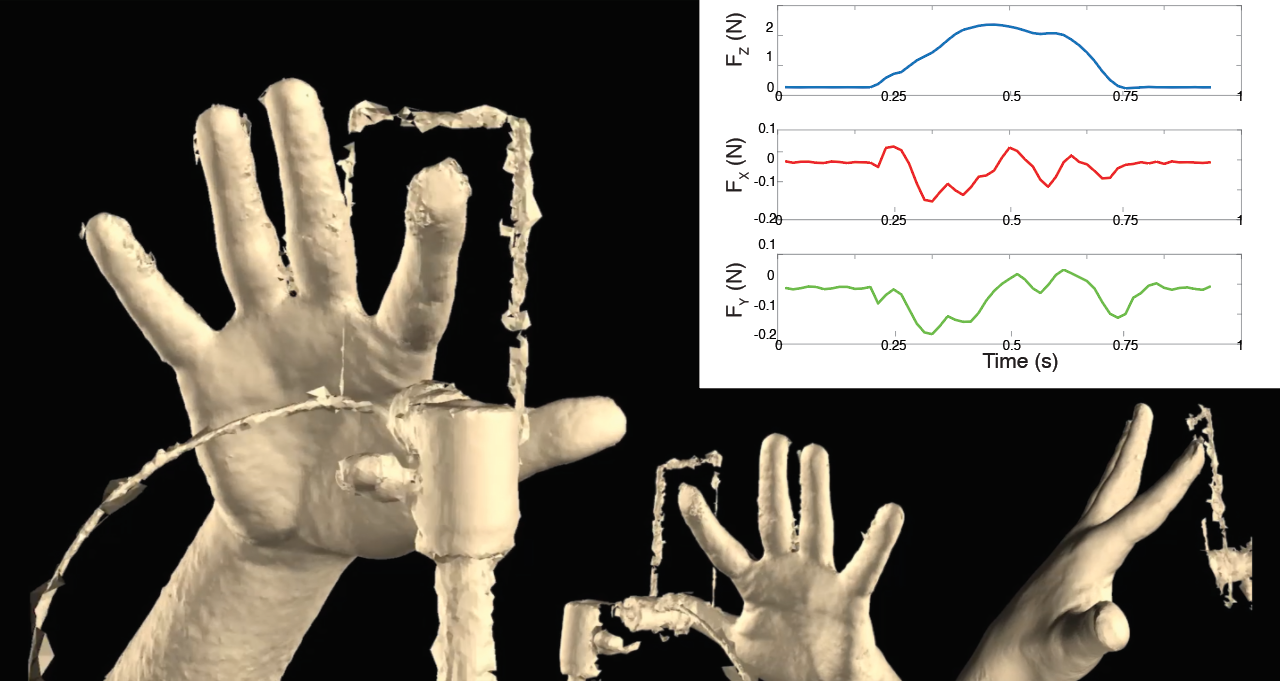
Little is known about the shape and properties of the human finger during haptic interaction even though this knowledge is essential to control wearable finger devices and deliver realistic tactile feedback. This study explores a framework for four-dimensional scanning and modeling of finger-surface interactions, aiming to capture the motion and deformations of the entire finger with high resolution. The results show that when the fingertip is actively pressing a rigid surface, it undergoes lateral expansion of about 0.2 cm and proximal/distal bending of about 30◦, deformations that cannot be captured by imaging of the contact area alone. This project constitutes a first step towards an accurate statistical model of the finger’s behavior during haptic interaction.
| Author(s): | David Gueorguiev and Dimitrios Tzionas and Claudio Pacchierotti and Michael J. Black and Katherine J. Kuchenbecker |
| Year: | 2018 |
| Month: | March |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Modeling Hand Deformations During Contact
|
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Work in Progress |
| Address: | San Francisco, USA |
| How Published: | Work-in-progress paper (3 pages) presented at the IEEE Haptics Symposium |
| State: | Published |
| URL: | https://2018proc.hapticssymposium.org/hapticscomp18/hapticscomp18wip-p1022-p.pdf |
|
BibTex @misc{Gueorguiev18-HSWIP-Model,
title = {Towards a Statistical Model of Fingertip Contact Deformations from 4{D} Data},
author = {Gueorguiev, David and Tzionas, Dimitrios and Pacchierotti, Claudio and Black, Michael J. and Kuchenbecker, Katherine J.},
howpublished = {Work-in-progress paper (3 pages) presented at the IEEE Haptics Symposium},
address = {San Francisco, USA},
month = mar,
year = {2018},
doi = {},
url = {https://2018proc.hapticssymposium.org/hapticscomp18/hapticscomp18wip-p1022-p.pdf},
month_numeric = {3}
}
|
|