Elephant trunks use an adaptable prehensile grip
2023
Article
hi
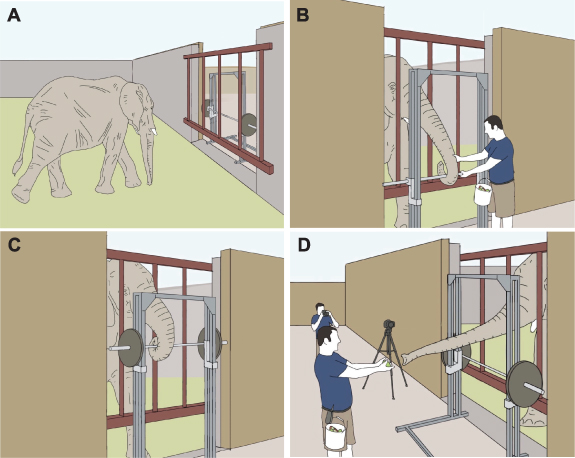
Elephants have long been observed to grip objects with their trunk, but little is known about how they adjust their strategy for different weights. In this study, we challenge a female African elephant at Zoo Atlanta to lift 20–60 kg barbell weights with only its trunk. We measure the trunk’s shape and wrinkle geometry from a frozen elephant trunk at the Smithsonian. We observe several strategies employed to accommodate heavier weights, including accelerating less, orienting the trunk vertically, and wrapping the barbell with a greater trunk length. Mathematical models show that increasing barbell weights are associated with constant trunk tensile force and an increasing barbell-wrapping surface area due to the trunk’s wrinkles. Our findings may inspire the design of more adaptable soft robotic grippers that can improve grip using surface morphology such as wrinkles.
| Author(s): | Andrew Schulz and Joy Reidenberg and Jia Ning Wu and Cheuk Ying Tang and Benjamin Seleb and Josh Mancebo and Nathan Elgart and David Hu |
| Journal: | Bioinspiration and Biomimetics |
| Volume: | 18 |
| Year: | 2023 |
| Month: | February |
| Department(s): | Haptic Intelligence |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1088/1748-3190/acb477 |
|
BibTex @article{Schulz23-BB-Lift,
title = {Elephant trunks use an adaptable prehensile grip},
author = {Schulz, Andrew and Reidenberg, Joy and Wu, Jia Ning and Tang, Cheuk Ying and Seleb, Benjamin and Mancebo, Josh and Elgart, Nathan and Hu, David},
journal = {Bioinspiration and Biomimetics},
volume = {18},
month = feb,
year = {2023},
doi = {10.1088/1748-3190/acb477},
month_numeric = {2}
}
|
|