Robotics for Occupational Therapy: Learning Upper-Limb Exercises From Demonstrations
2021
Article
hi
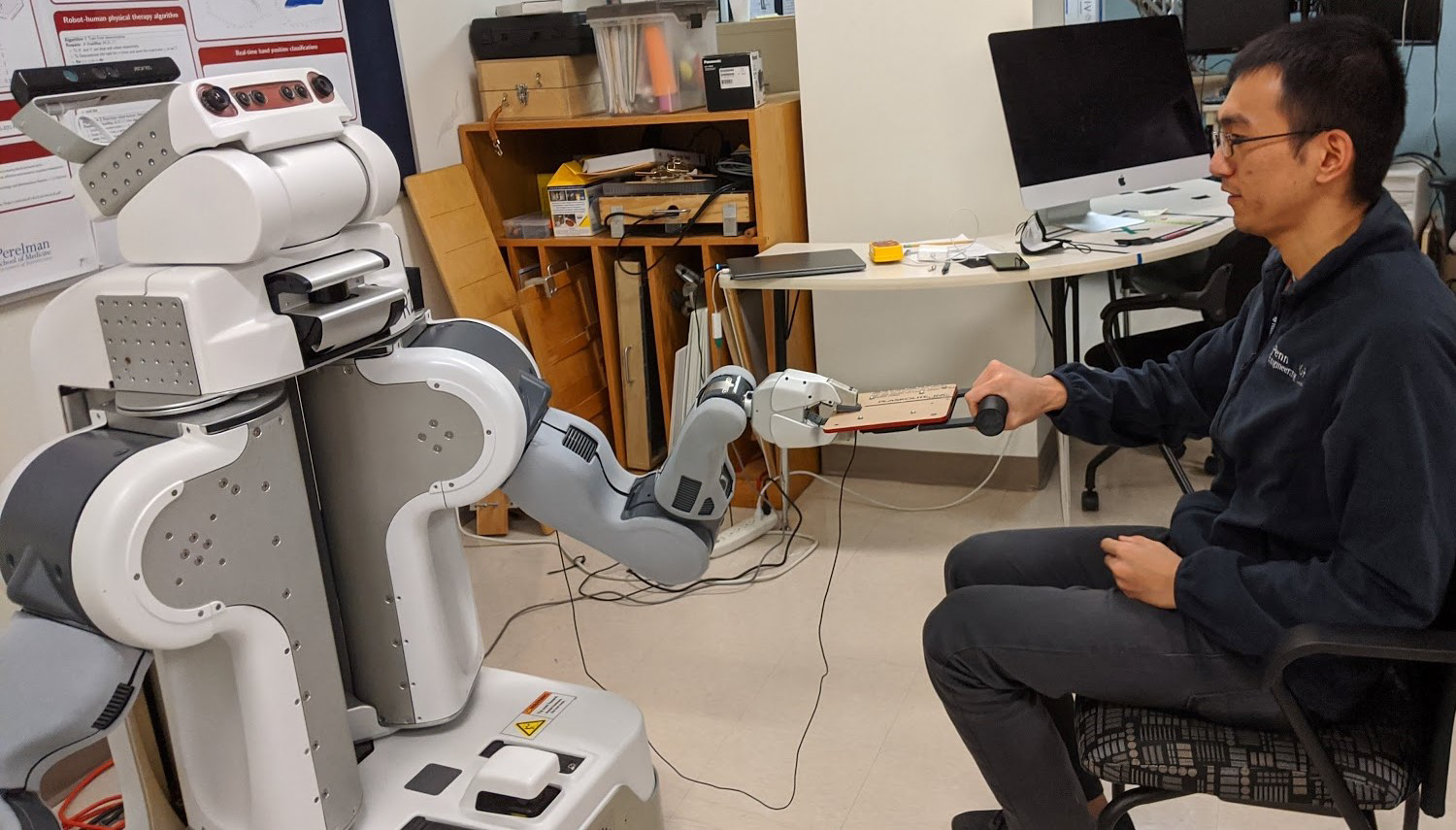
We describe a learning-from-demonstration technique that enables a general-purpose humanoid robot to lead a user through object-mediated upper-limb exercises. It needs only tens of seconds of training data from a therapist teleoperating the robot to do the task with the user. We model the robot behavior as a regression problem, inferring the desired robot effort using the end-effector's state (position and velocity). Compared to the conventional approach of learning time-based trajectories, our strategy produces customized robot behavior and eliminates the need to tune gains to adapt to the user's motor ability. In our study, one occupational therapist and six people with stroke trained a Willow Garage PR2 on three example tasks (periodic 1D and 2D motions plus episodic pick-and-place). They then repeatedly did the tasks with the robot and blindly compared the state- and time-based controllers learned from the training data. Our results show that working models were reliably obtained to allow the robot to do the exercise with the user; that our state-based approach enabled users to be more actively involved, allowed larger excursion, and generated power outputs more similar to the therapist demonstrations; and that the therapist found our strategy more agreeable than the traditional time-based approach.
| Author(s): | Siyao Hu and Rochelle Mendonca and Michelle J. Johnson and Katherine J. Kuchenbecker |
| Journal: | IEEE Robotics and Automation Letters |
| Volume: | 6 |
| Number (issue): | 4 |
| Pages: | 7781--7788 |
| Year: | 2021 |
| Month: | October |
| Department(s): | Haptic Intelligence |
| Research Project(s): |
Learning Upper-Limb Exercises from Demonstrations
|
| Bibtex Type: | Article (article) |
| DOI: | 10.1109/LRA.2021.3098945 |
| State: | Published |
|
BibTex @article{Hu21-RAL-Therapy,
title = {Robotics for Occupational Therapy: Learning Upper-Limb Exercises From Demonstrations},
author = {Hu, Siyao and Mendonca, Rochelle and Johnson, Michelle J. and Kuchenbecker, Katherine J.},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {4},
pages = {7781--7788},
month = oct,
year = {2021},
doi = {10.1109/LRA.2021.3098945},
month_numeric = {10}
}
|
|