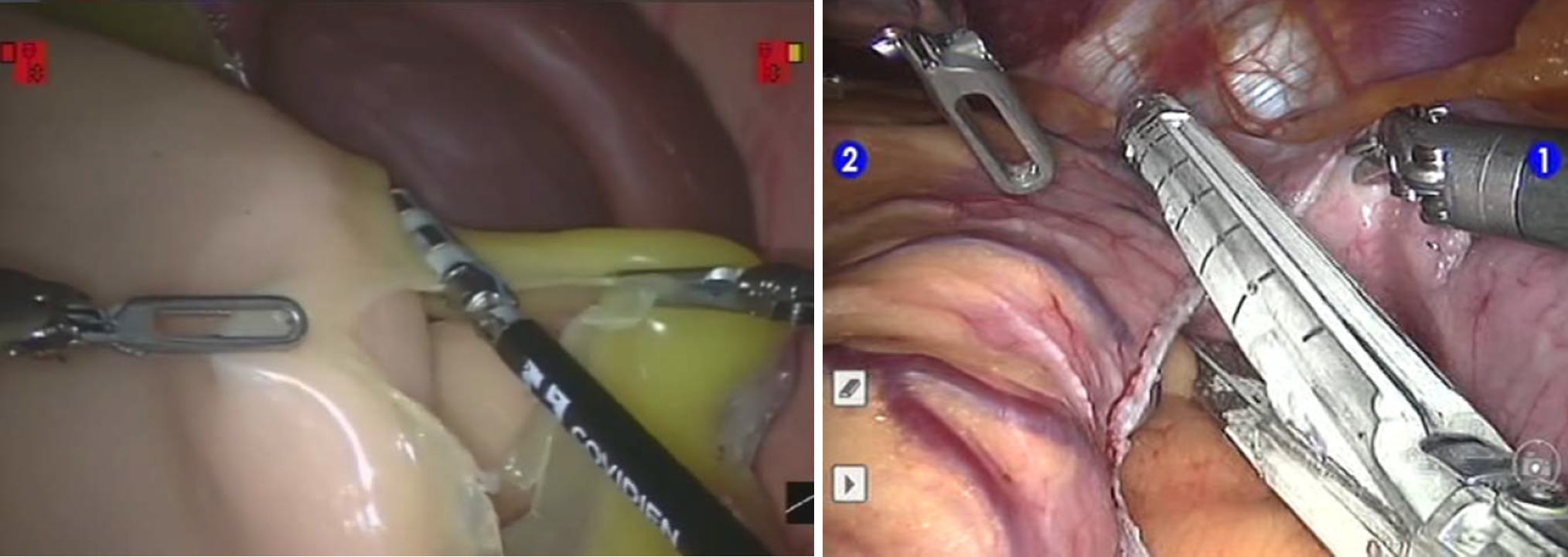
Screen captures of robot-assisted sleeve gastrectomy: (Left) Simulated surgery on our custom organ model. (Right) Clinical surgery during the stapling of the stomach.
The lack of haptic feedback is a potential limitation of existing robotic surgical systems. Members of Dr. Kuchenbecker's group at Penn previously invented a haptic feedback system named VerroTouch that is able to deliver the vibrations of surgical instruments to the surgeon’s hands as he or she remotely operates a laparoscopic surgical robot. To record the instrument vibrations, the system uses MEMS-based accelerometers mounted on the arms of the surgical robot.
Our recent work has shown that instrument contact vibration is a potential quantitative measure of technical surgical skill. Compared to novices, experienced surgeons complete robotic surgery tasks with significantly lower instrument vibration magnitudes, shorter completion times, and fewer instrument contacts. These vibration metrics might be a better approach to current surgical skills assessment through manual video evaluation, which is time consuming and subject to rater bias.
Our aim is to continue to study the effect of haptic feedback on surgeons during robotic surgery. In this project, we are investigating the effect of haptic feedback on intraoperative performance of residents in robot-assisted surgery. Twelve resident surgeons were included in this study; eleven of them are right-hand dominant. Residents were assigned to a series of simulation training and were randomized to receive either haptic feedback through VerroTouch or no haptic feedback (the standard operating method). The performance of these residents was then tracked as they performed robotic surgery both in simulation and on live human patients. We hypothesize that haptic feedback of instrument vibrations during robotic surgery practice will significantly improve resident skill in the operating room.
This study was conducted at the Hospital of the University of Pennsylvania, USA.