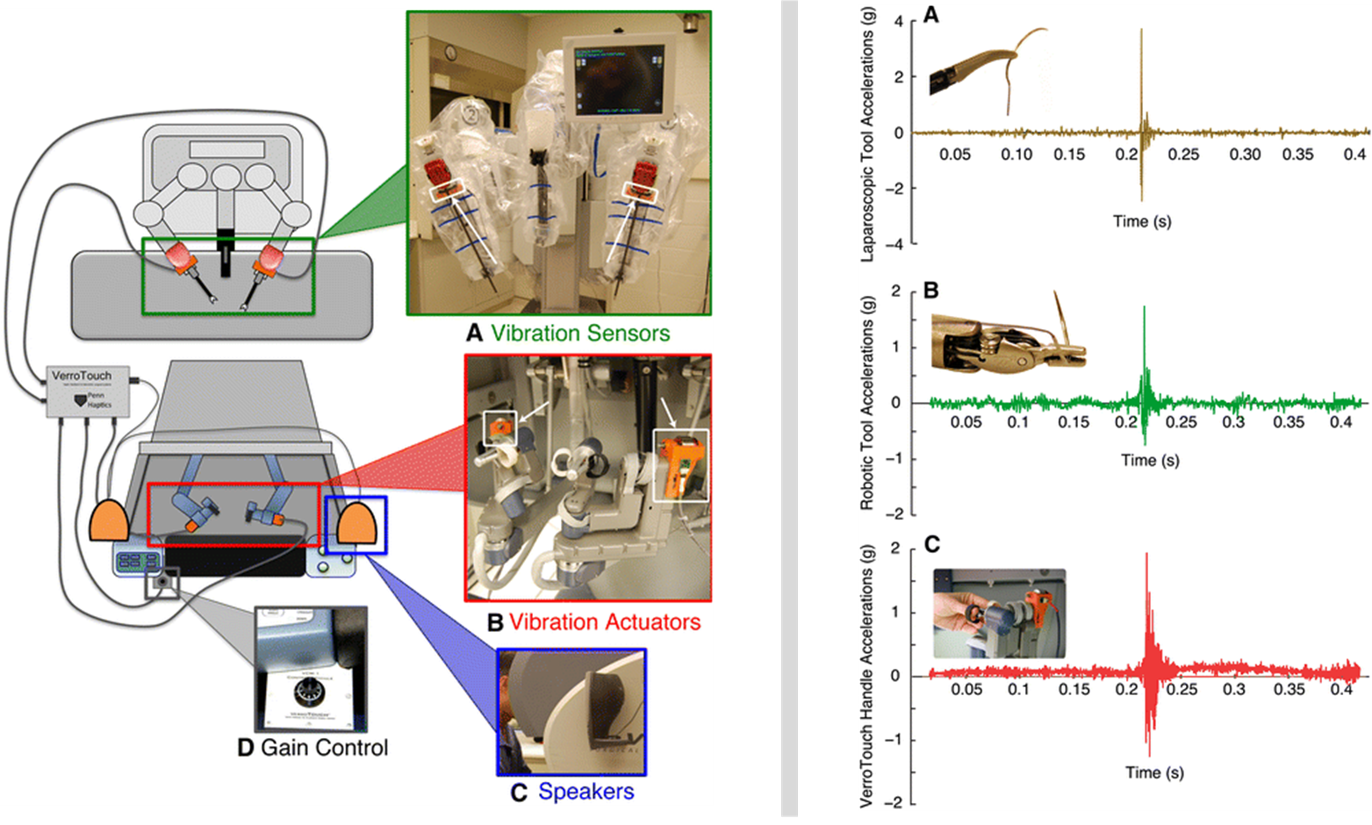
(Left) Overview of the current version of the VerroTouch system for providing haptic feedback in robotic surgery. (Right) High-frequency accelerations measured when grasping a needle using (a) a laparoscopic tool and (b) a robotic surgery instrument. (c) Accelerations produced by VerroTouch at the surgeon's control handle when the corresponding instrument experiences the accelerations shown in (b).
When performing minimally invasive robotic surgery, surgeons must currently rely only on their visual sense, as commercially available robotic surgery systems provide no touch feedback. Dr. Kuchenbecker and other members of the Penn Haptics Group previously invented a vibrotactile haptic feedback system that accurately replicates vibrotactile events for robotic surgical platforms.
Called VerroTouch, this system senses the contact vibrations of the robotic instruments using 3-axis accelerometers mounted on the robot’s arms. It then reproduces these vibrations for surgeons to feel through a voice coil actuator that is attached to each handle of the surgeon's console. VerroTouch allows surgeons to perform robotic surgery in a teleoperated environment with sensations that are closer to those felt during normal surgery.
A robust, low-cost system with high accuracy is critically important for clinical settings. Therefore, this research project aims to create a new integrated version of the VerroTouch system that is able to sense, transmit and process vibrations both digitally and wirelessly. Moving from analog circuitry to a digital platform will not only improve system performance but will also enable us to study a wide range of new scientific questions in this domain, such as the optimal way of transforming 3D vibrations to 1D, or whether overlaying virtual cueswith real vibrotactile signals enables new capabilities.