Self-tuning in Sliding Mode Control of High-Precision Motion Systems
2013
Conference Paper
hi
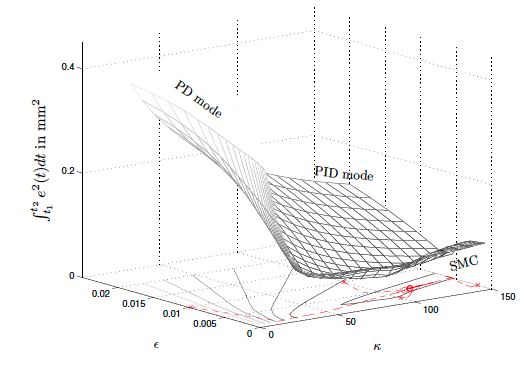
In high-precision motion systems, set-point tracking often comes with the problem of overshoot, hence poor settling behavior. To avoid overshoot, PD control (thus without using an integrator) is preferred over PID control. However, PD control gives rise to steady-state error in view of the constant disturbances acting on the system. To deal with both overshoot and steady-state error, a sliding mode controller with saturated integrator is studied. For large servo signals the controller is switched to PD mode as to constrain the integrator buffer and therefore the overshoot. For small servo signals the controller switches to PID mode as to avoid steady-state error. The tuning of the switching parameters will be done automatically with the aim to optimize the settling behavior. The sliding mode controller will be tested on a high-precision motion system.
| Author(s): | Heertjes, Marcel F. and Vardar, Yasemin |
| Journal: | IFAC Proceedings Volumes |
| Volume: | 46 |
| Number (issue): | 5 |
| Pages: | 13 - 19 |
| Year: | 2013 |
| Department(s): | Haptic Intelligence |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | https://doi.org/10.3182/20130410-3-CN-2034.00019 |
| Note: | 6th IFAC Symposium on Mechatronic Systems |
| URL: | http://www.sciencedirect.com/science/article/pii/S1474667015361917 |
| Links: |
|
| Attachments: |
heertjes_ifac2013
|
|
BibTex @inproceedings{HEERTJES201313,
title = {Self-tuning in Sliding Mode Control of High-Precision Motion Systems},
author = {Heertjes, Marcel F. and Vardar, Yasemin},
journal = {IFAC Proceedings Volumes},
volume = {46},
number = {5},
pages = {13 - 19},
year = {2013},
note = {6th IFAC Symposium on Mechatronic Systems},
doi = {https://doi.org/10.3182/20130410-3-CN-2034.00019},
url = {http://www.sciencedirect.com/science/article/pii/S1474667015361917}
}
|
|