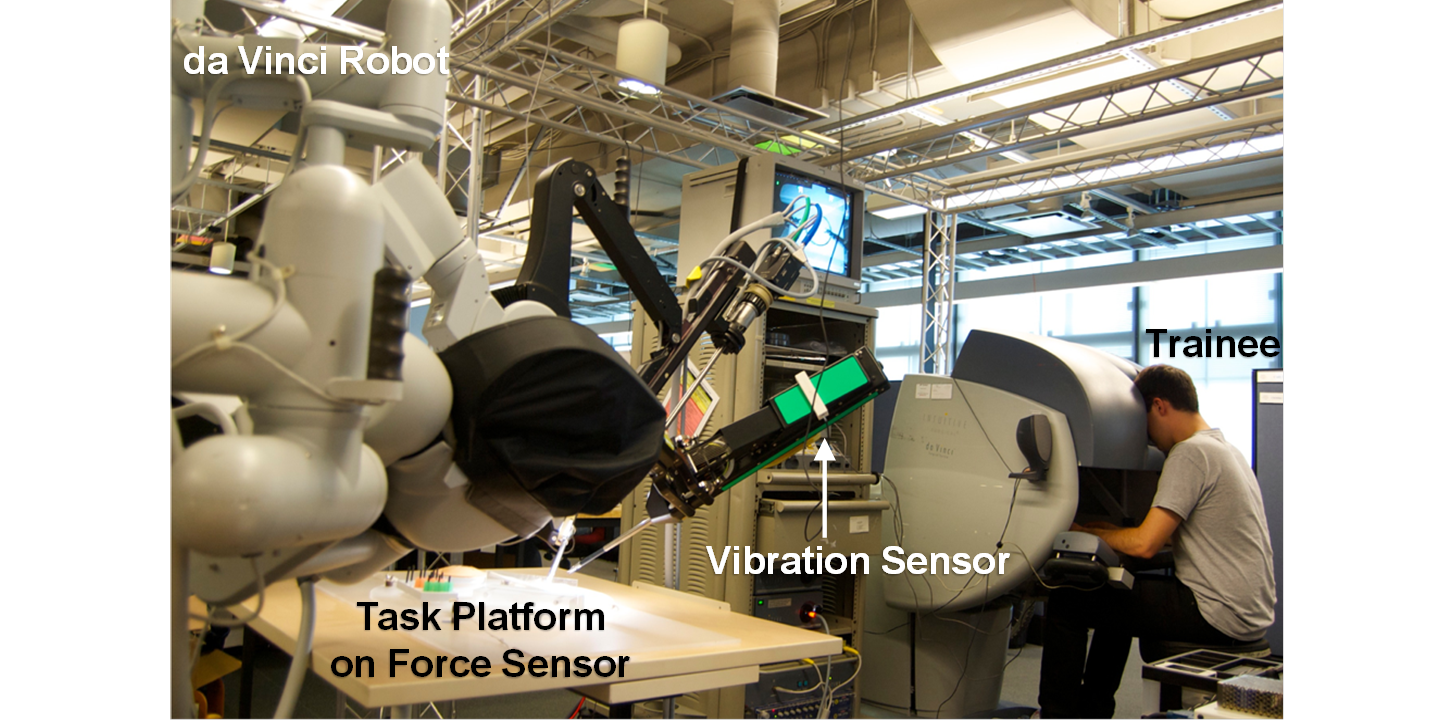
The overall configuration of the learning curve study, wherein surgical trainees learned to perform the peg transfer training task using a da Vinci surgical robot either with or without vibrotactile haptic feedback. A single 3-axis vibration sensor is attached to each arm of the da Vinci robot. A force sensor located below the platform measures the force that the trainee exerts with the robot.
Robotic minimally invasive surgery systems such as the Intuitive Surgical da Vinci system physically separate the surgeon from the surgical tools. As touch cues are known to play a critical role in manipulation tasks, the resulting loss of the sense of touch may affect the speed and skill with which one can learn to perform surgery through such a system.
We hypothesize that tactile feedback of instrument vibrations could accelerate trainee learning of key robotic surgery skills. Specifically we quantify task performance in terms of completion time, the force applied to the task materials, and the vibrations induced in the surgical instruments. We chose to test this hypothesis by application to a peg transfer task, as it is a well-known training task in minimally invasive surgery that is easy for novices to perform but difficult for them to master.
We designed a human-subject experiment that enrolled 16 fourth-year medical students intending to pursue a career in surgery. We then tested our hypothesis by evaluating the process by which each participant learned to perform peg transfer; half learned with vibrotactile feedback, and the other half learned without. Our overall findings show that this form of haptic feedback does indeed accelerate the learning process for peg transfer.