Tactile Textiles: An Assortment of Fabric-Based Tactile Sensors for Contact Force and Contact Location
2020
Miscellaneous
hi
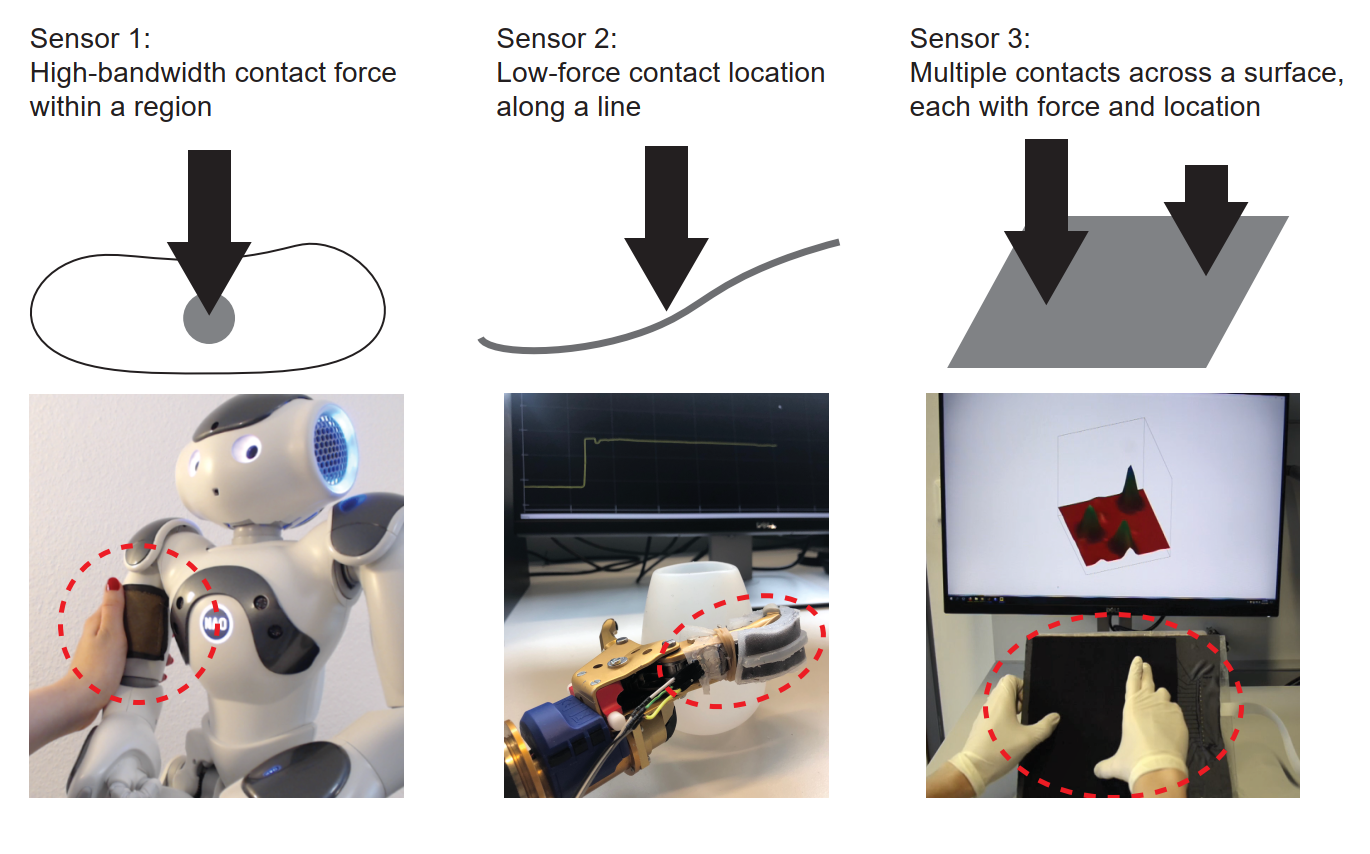
Fabric-based tactile sensors are promising for the construction of robotic skin due to their soft and flexible nature. Conductive fabric layers can be used to form piezoresistive structures that are sensitive to contact force and/or contact location. This demonstration showcases three diverse fabric-based tactile sensors we have created. The first detects dynamic tactile events anywhere within a region on a robot’s body. The second design measures the precise location at which a single low-force contact is applied. The third sensor uses electrical resistance tomography to output both the force and location of multiple simultaneous contacts applied across a surface.
| Author(s): | Rachael Bevill Burns and Neha Thomas and Hyosang Lee and Robert Faulkner and Katherine J. Kuchenbecker |
| Year: | 2020 |
| Month: | September |
| Department(s): | Haptic Intelligence |
| Research Project(s): | |
| Bibtex Type: | Miscellaneous (misc) |
| Paper Type: | Demonstration |
| Address: | Leiden, The Netherlands |
| How Published: | Hands-on demonstration presented at EuroHaptics |
| Note: | Rachael Bevill Burns, Neha Thomas, and Hyosang Lee contributed equally to this publication |
| State: | Published |
|
BibTex @misc{Burns20-EHD-Textiles,
title = {Tactile Textiles: An Assortment of Fabric-Based Tactile Sensors for Contact Force and Contact Location},
author = {Burns, Rachael Bevill and Thomas, Neha and Lee, Hyosang and Faulkner, Robert and Kuchenbecker, Katherine J.},
howpublished = {Hands-on demonstration presented at EuroHaptics},
address = {Leiden, The Netherlands},
month = sep,
year = {2020},
note = {Rachael Bevill Burns, Neha Thomas, and Hyosang Lee contributed equally to this publication},
doi = {},
month_numeric = {9}
}
|
|